

Questo articolo è un’appendice di completamento per la taratura di impianto audio P.A.
Per comprendere al meglio quanto segue è necessario aver studiato l’articolo: Appunti per P.A. Manager, e System Designer – Line Array.
Una volta installato l’impianto come da progetto si passa alla fase di Verifica e Calibrazione con la Verifica ed Ottimizzazione del corretto Livello, Tempo e Fase del segnale audio.
Raccomandazioni
Si raccomanda di utilizzare microfoni di misura, strumentazione di analisi, filtri di crossover ed equalizzazione più lineari e trasparenti possibile.
La Taratura e Calibrazione è l’analisi di conferma ed eventuale modifica del setup dell’impianto audio realizzato tramite progetto.
Microfono di Misura
Per quanto riguarda il microfono di misura utilizzare capsule da 1/4 di pollice o meno, ma in generale che abbia una risposta da 20 Hz a 20 KHz più lineare possibile.
Note
Il microfono di misura deve essere Omnidirezionale in quanto l’obbiettivo sarà quello di linearizzare la risposta dell’impianto audio “all’ascolto” (quindi NON la risposta lineare dei componenti, ma quella dalle nostre orecchie percepita), quindi sarà necessario simulare l’ascolto delle nostre orecchie e dell’apparato uditivo.
L’ascolto nostro è binaurale e a 360 gradi con deviazioni della risposta come spiegato in articolo Psicoacustica.
A livello microfonico quello che si avvicina di più è appunto il microfono a Condensatore Omnidirezionale. La cui misura della risposta deve essere poi ponderata come da impostazioni di SMAART viste nell’articolo Appunti per P.A. Manager e che vedremo ulteriormente in questo articolo.
C’è da fare anche un altra considerazione che è quella del fatto che un microfono di per sé ma nemmeno il programma di analisi spettrale, non riesce a simulare le varie interferenze e risonanze naturali del condotto uditivo, per questo dopo la calibrazione acustica è fondamentale ascoltare l’audio post correzione eq. cosi da valutare se soprattutto in medio alta ed alta la risposta è acusticamente accettabile.
Se si ha la possibilità la migliore soluzione sarebbe quella di utilizzare una Dummy Head che abbia una risposta in frequenza più lineare e a più basso rumore possibile. La Dummy Head è sicuramente la migliore soluzione a simulare la risposta media dell’orecchio umano.
In caso di Dummy Head sarà necessario dividere i microfoni di misura (2), in due funzioni di trasferimento separate per poi mediare le due curve risultanti (e questo è il caso esclusivo per la Magnitude Response, mentre per l’analisi della risposta all’impulso e fase va bene utilizzare ancora il singolo microfono omnidirezionale).
Filtri Crossover
Per quanto riguarda i filtri di crossover utilizzare quando possibile filtri FIR a Fase Lineare cosi da avere migliore qualità ed una minore distorsione di fase.
Software di Analisi
Per la strumentazione di analisi utilizzare software di misurazione acustica di comprovata qualità ed affidabilità, es. Smaart Live.
Hardware per misurazione
Per l’hardware di analisi utilizzare interfacce audio con pre-amplificatori microfonici più trasparenti possibile, anche qui quanto meno lineari da 20 Hz a 20 KHz nella risposta in frequenza e con un buon rapporto di impedenza di ingresso rispetto a quella di uscita dal microfono di misura, quanto meno 1:10.
Cavo per microfono di misura
Anche il cavo che va dal microfono di misura al pre-amplificatore microfono deve essere più trasparente possibile, quindi optare per cavi a bassa impedenza e bassa capacitanza, bilanciati e possibilmente con pin di connessione placati oro.
Cavo per impianto audio
Discorso a parte ma del tutto simile per quanto riguarda la strumentazione direttamente connessa all’impianto audio, se Attivo utilizzare sempre cavi bilanciati come detto per il cavo del microfono di misura, se passivo utilizzare cavi di potenza sempre a bassa impedenza.
Amplificatori
Anche gli amplificatori utilizzati per inviare segnale di potenza devono essere più trasparenti possibile, se attivi sono già on board al sistema audio, ma se passivi utilizzare amplificatori in dotazione dal produttore o nel caso scegliere amplificatori di potenza ed impedenza adeguata, l’importante è che siano trasparenti nella risposta in frequenza e dinamica, possibilmente con processore di segnale integrato e ingresso digitale.
Processori di Segnale
Nel caso si utilizzi un processore di segnale esterno, questo deve come sempre essere il più trasparente possibile, possibilmente con ingressi ed uscite digitali, filtri FIR e che abbia la possibilità di un controllo completo del processamento del sistema.
Corrente
Di fondamentale importanza sarà poi l’utilizzo di una rete elettrica di idonea potenza per alimentare correttamente ed in modo stabile tutti gli amplificatori di segnale (consigliato l’utilizzo di stabilizzatori di corrente/tensione).
Considerazioni
Di base sarà importate avere sempre come riferimento la risposta pura senza filtri attivi della singola sorgente. Per sorgenti ad amplificazione separata come sistemi multi-via senza crossover integrato il discorso rimane lo stesso, solo da ripetere per ogni elemento separato del sistema, per semplificare si considerano Sub e Satelliti come due elementi distinti, poi nel caso di un Satellite ad esempio a 3 o 4 vie, la stessa procedura che si vedrà per il Satellite sarà da ripete per ogni via.
La risposta in frequenza del sistema è fondamentale e già vista e tenuta come riferimento in fase di progettazione, questo è utile anche in questo caso al fine di far lavorare meno possibile il sistema su di un range di frequenze che fatica a riprodurre per evitare distorsioni e danneggiamenti dei componenti altoparlanti.
In figura 1 un esempio di risposta di riferimento per quanto riguarda il singolo elemento Sub ed il singolo elemento Satellite utilizzato per la progettazione in System Designer – Line Array. La cosa migliore se non già fornito sarebbe quella di chiedere al produttore il grafico della risposta in frequenza, ma se non si ha la possibilità è necessario eseguire un analisi personale, e se possibile eseguirla sempre in un ambiente più anecoico possibile, con microfono di misura ad 1 metro di distanza dal centro asse del diffusore e con un equo livello del segnale di test.
Fig. 1

La misurazione sarà importante farla almeno con una risoluzione di 1/24 di ottava per poterne analizzare dettagli, tranne come vedremo in alcuni casi in cui risulterà più chiaro e sufficiente anche risoluzioni inferiori. E’ poi bene prendere più di un campione di misura per comparazione.
In questo caso si possono vedere i limiti inferiore e superiore (+/- 6 dB) del Sub che sono circa 40 Hz e 2 KHz, e limiti inferiore e superiore (+/- 6 dB) del Satellite, da circa 90 Hz a circa 15 Khz con un piccolo buco a 12 KHz.
Per il sistema Satellite, in questo caso 2 vie, si nota anche un avvallamento da circa 570 Hz a 1,5 KHz ma questo è dato un mal funzionamento del crossover passivo integrato, quindi da considerarne una sostituzione per poi una rivalutazione.
Considerando i dati raccolti sarà importante mantenere le frequenze del Satelliti sotto i 90 Hz ad un più basso livello possibile, possibilmente sotto i 10 dB già a 80 Hz cosi da avere minor distorsione e stress possibile per la sorgente.
Mentre in considerazione dei limiti inferiori del Sub e superiori del Satellite si può dire che è possibile anche qui utilizzare filtri crossover per limitarne l’escursione al di sotto ed al di sopra ma, lasciando libero a livello crossover, è sicuramente più qualitativo in quanto vi è la presenza di un componente filtro in meno, a livello di sorgente si può dire che è possibile lasciare la loro riproduzione naturale a patto di non avere una sorgente musica che opera con frequenze fondamentali al di solito del limite inferiore o al di sopra del limite superiore e a patto di non andare poi con l’equalizzatore a dare Boost in quelle zone, evitando stress e distorsioni dell’altoparlante a lungo andare con pericolo di rotture.
Da fare attenzione quindi durante la taratura, soprattutto con equalizzazioni automatiche per cui bisogna andare a confinare il range di lavoro all’interno del range ottimale di riproduzione, e da considerare anche nel mix evitando di equalizzare strumenti su frequenze al di fuori della banda di riproduzione ottimale.
NON EQUALIZZARE IN BOOST OLTRE I LIMITI INFERIORI E SUPERIORI DEL SISTEMA SENZA FILTRO CROSSOVER.
n.b. In generale ogni volta che si installa un impianto audio, che si cambi l’amplificatore finale, il processore di segnale, qualsiasi componente che fa parte della catena audio sarebbe buona norma analizzare nuovamente la risposta in frequenza delle sorgenti per capire poi come operare in fase di progettazione e taratura.
Oltre a questo sarà importate avere come riferimento anche la risposta di fase del sistema (fig. 2), e questo è un parametro molto variabile in base alla configurazione dell’impianto. La risposta di fase ci dirà a che frequenza possiamo inserire il filtro crossover, che dovrebbe essere quella di progetto.
La corretta scelta sarà quella in cui la fase del sistema Sub e Satelliti ha minore sfasamento possibile.
Se si vuole misurare anche il valore SPL rilevato sarà opportuna avvalersi di un microfono di misura correttamente tarato secondo le procedure di calibrazione date dal Software in uso, e questo è possibile farlo attraverso il software di analisi acustica come Smaart Live, oppure avvalersi di un Fonometro quanto meno di classe 1 e seguire le varie procedure di calibrazione necessarie quando necessarie. Si può utilizzare anche lo stesso microfono utilizzato per la calibrazione dell’impianto una volta finito il processo, ad esempio ponendolo a lato regia cosi da monitorare costantemente se il livello SPL dBA rimanere all’interno dei limiti di legge consentiti.
Processo di Calibrazione (Allineamento di Fase e Livello SPL)
Si evidenziano indicativamente gli step di taratura in base alla configurazione di progetto dell’impianto audio. Si da quindi per scontato la capacità di utilizzo del software di misurazione acustica (in questo caso si utilizzerà Smaart Live).
Questi passaggi sono da eseguire ad ogni installazione, in quanto ambienti diversi, materiali e tecnologie diversi, cablaggi, cambi di stato della temperatura ambientale ed operativa dei macchinari, condizione meteo e qualsiasi altra cosa possa venire in mente può direttamente o indirettamente modificare le condizioni ideali di progetto e quindi c’è sempre da controllare la calibrazione di tutto.
Alla fine di questo articolo verrà proposta una tabella con tutti gli step di taratura in base al tipo di configurazione dell’impianto audio.
Per l’allineamento di fase si considera la frequenza di crossover tra Sub e Satelliti, ma il processo è da applicare allo stesso modo anche per Satelliti multi via ad amplificazione separata, quindi ad esempio tra medi ed alti.
Dopo diversi test effettuati il segnale che consente di effettuare una misurazione precisa e definita del tempo, livello e sincronismo dei diffusori e del segnale di misura con quello di riferimento all’interno della Funzione di Trasferimento, è il Rumore Rosa e più di recente il rumore SMPTE che non è altro essere una modifica del Rumore Rosa a più ampia banda e più ampia dinamica, quindi più indicato per la misurazione e taratura dei moderni sistemi di altoparlanti.
Rumore Rosa: Bandwith: 20 Hz – 20 KHz. Dinamica: 6 dB
Rumore SMPTE: Bandwith: 10 Hz – 22,4 KHz. Dinamica: 11,5 – 12 dB
A differenza del Rumore Rosa che la sua oscillazione di Ripple dipende molto dal tipo di generatore, il Rumore SMPTE è un tipo di rumore standardizzato, è un rumore digitale e il suo Ripple è contenuto entro i +/- 0,25 dB per ogni terzo d’ottava da 20 Hz a 16 KHz (più che sufficiente per una misurazione accurata e precisa). Avendo inoltre un Crest Factor più ampio è più fedele nel ricalcare la risposta in frequenza dinamica degli altoparlanti, che in media quelli moderni hanno un Crest Factor simile sui 12 dB.
E’ bene però fare le dovute precisazioni, ad esempio in Smaart Live come può essere anche in altri software di misurazione acustica l’SMPTE è un algoritmo non ancora del tutto perfezionato per il processo di analisi della Funzione di Trasferimento, di fatti genera più errori e fatica molto più che il rumore rosa a sincronizzare il segnale di misura con quello di riferimento. Per questo è bene ancora utilizzare e preferire il Rumore Rosa.
Come segnale di misurazione è bene citare anche lo Sweep che ha la sua maggiore forza rispetto ai rumori continui in ambiente con molto rumore, riverbero, echi. Lo Sweep eccita le frequenze di tutto il range definito o Broadband (in quanto può essere definito per un range di frequenze definito, o ricavata da un Rumore Rosa o SMPTE), una sola volta ad un solo step o più step a secondo di come lavora il generatore. Eccitando quindi solo una volta l’ambiente il rapporto segnale rumore è molto ampio e ben definito, spesso con richiesta di mediazione molto più contenuta rispetto ad avere un rumore costante. E soprattutto in ambiente Live consente con risultati comparabili, di fare meno rumore e disturbare cosi meno altri addetti ai lavori, di stressare meno le nostre orecchie e gli altoparlanti stessi, ed essendo uno Sweep che dura frazione di secondo poter avere anche più tempo poi per effettuare del Silent Tuning.
Come grado di ponderazione e risoluzione FFT questo dipenderà molto dalla frequenza presa in esame, dall’ambiente in cui i diffusori andranno a diffondere il suono e dal tipo di analisi che si necessità fare.
Come visto in argomento Appunti per P.A. è da valutare il corretto settaggio in base all’ambiente e al tipo di misura da rilevare.
Durante le fasi di analisi le risposte potrebbero essere alterate dall’ambiente circostante e questo può tendere a scostare i riferimenti di calibrazione definiti in fase di progetto soprattutto se si è utilizzato un Software di simulazione acustica in campo libero. Ma non solo, anche un mal funzionamento di un apparecchiatura può indurre ad un rilievo errato.
Saranno quindi da valutare ed identificare eventuali interferenze ambientali e problemi ai componenti.
Di fatti se si ha la possibilità è consigliato avere dei Loop di misurazione delle apparecchiature, quindi non solo rilevare la risposta acustica ma anche la risposta elettrica dei componenti per capire se ci sono mal funzionamenti.
In figura 4 un esempio di Routing in considerazione anche dell’analisi dei componenti elettrici come processori, mixer e DSP.
Fig. 4

Nell’esempio di Figura 4 il collegamento permettere ad esempio di rilevare la funzione di trasferimento del segnale di riferimento (Signal Generator diretto tramite loop da Smaart) con quello rilevato dal microfono di misura, ma anche il segnale di riferimento (Signal Generator in uscita dal Mixer) con quello rilevato quello rilevato dal microfono di misura o quello diretto tramite loop da Smaart), e ancora il segnale di riferimento in uscita dal DSP (Eq.), sempre con il Microfono di Misura o altra via del segnale di riferimento (uscita dal Mixer o Loop). E’ quindi possibile monitorare costantemente tutte le fasi di questa catena audio e rilevare eventuali malfunzionamenti o capire come lavora ad esempio un equalizzatore, un preamplificatore, un delay, ecc..
L’altezza del microfono di misura dovrà essere quella del ricettore utilizzato nel progetto, che più in generale utile soprattutto se non si è eseguito un progetto, è di circa 1,70 metri per un ascolto in piedi, e 1,40 metri per un ascolto seduto, sempre in riferimento al piano in cui ci si trova (a terra, in balconata, ecc..).
Alcune tecniche prevedono il posizionamento del microfono di misura appoggiato sul piano terra, dal punto di vista dell’analisi questo risulta utile al fine di comparare e capire gli effetti della riflessione del pavimento ma da non mediare nel processo di equalizzazione, quanto piu per cercare di escludere e limitare nel processo di calibrazione Boost e Cut su frequenze con eccessiva impronta tonale causata dalle riflessioni ambientali. Avendo il microfono sul pavimento la misura sarà fortemente discostata da quella che è la zona di percezione uditiva ben più in alto e tra l’altro presenta ugualmente le riflessioni del soffitto, pareti ed oggetti all’interno dell’ambiente.
Il suo utilizzo è inoltre necessario esclusivamente quando la coerenza di misura è inferiore all’80% (analizzabile attraverso la funzione di trasferimento), quindi probabilmente per misurazioni a distanza in ambienti riverberanti.
Sarà importante mantenere l’ordine dei processi per una corretta calibrazione.
Pink Noise Random o Pseudorandom?
In Smaart esistono due tipologie di Rumore Rosa, quello Random non altro che una generazione continua di numeri casuali nel tempo filtrati digitalmente e quello Pseudorandom che invece è una sequenza di numeri casuali che si ripete nel tempo.
Il vantaggio del rumore Pseudorandom è che è un processo ripetibile e quindi il sistema è in grado più precisamente di identificare una corretta analisi temporale media comparativa ed un più preciso tempo di ritardo tra il segnale di misura e quello di riferimento per la Funzione di Trasferimento.
Sweep vs Pink o SMPTE Noise
Prima di proseguire con i processi di taratura è bene far chiarezza sull’utilizzo o meno dello Sweep come processo di calibrazione. E’ vero che lo Sweep è un segnale rapido che eccita una sola volta o per sequenze di volte definite il sistema sonoro e l’ambiente circostante, riducendo sostanzialmente il rumore ed il disturbo arrecato agli altri addetti ai lavori, allo stress degli altoparlanti ed è piu preciso per quanto riguarda il rilievo sulla risposta all’impulso anche se questo è comparabile con una piu corretta taratura del Rumore Constante come il Rosa o SMPTE (solo che ci si impiega piu tempo per la corretta calibrazione). Eccitando una sola volta per frequenza l’ambiente consente di avere un rapporto segnale rumore molto piu elevato rispetto ad un rumore costante come quello rosa o SMPTE e questo lo fa preferire per il rilievo della risposta all’impulso (ma in presenza di un rilievo Single Channel o in inserimento di un file .wav registrato della risposta all’interno dell’Ecogramma.
In termini di fase e calibrazione come vedremo, nella fase di allineamento si guarda essenzialmente il picco dell’impulso e non il decadimento e comportamento del suono nel tempo, materia piu utile per trattamenti acustici degli ambienti, rilevamento di rumori, echi, riverbero (anche se possono essere in certi casi utili per ridefinire il corretto posizionamento dell’impianto audio anche se questo dovrebbe essere fatto in fase di progettazione considerato i limitati tempi di taratura che ci sono negli eventi Live).
L’impulso è chiaramente sempre visibile anche in utilizzo di un Rumore Costante in quanto di maggior livello rispetto ad echi e riverberi essendo suono diretto e software come Smaart che lavora per funzione di trasferimento tende a sua volta a dare maggior valore alle medie per ottenere risoluzione piu elevata sul suono diretto.
In figura 5 una comparazione tra la risposta all’impulso rilevata con Rumore Rosa e Sweep.
Fig. 5
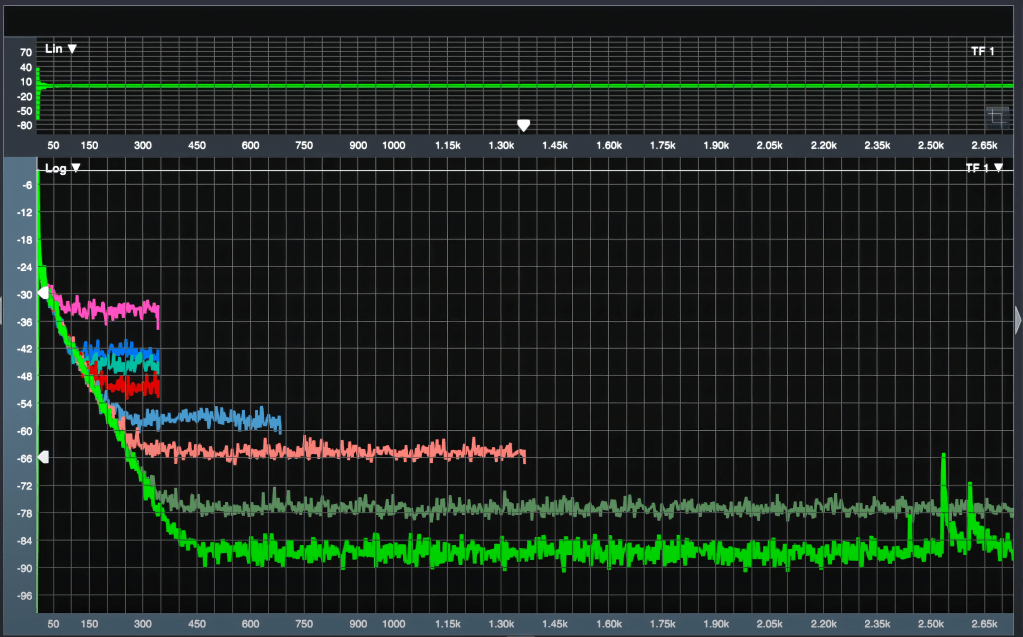
Lo Sweep è la risposta in verde con maggior rapporto segnale rumore quindi quella piu in basso, dove sono chiaramente visibili anche gli echi oltre i 2,5 secondi di analisi.
Le altre risposte sono rilevate con Rumore Rosa e tanto più media e valori alti di Size FFT ci sono e tanto più in relazione alla risposta dell’ambiente avrò un rapporto segnale rumore elevato fino a raggiungere livelli comparabili con lo Sweep ma in cui faccio comunque fatica a rilevare gli echi, questo in quanto è un rumore costante che continua a propagare suono eccitando costantemente l’ambiente.
In ogni caso il Picco della risposta è sempre visibile entro i 50 ms, e quindi è un metodo che per la sincronizzazione della risposta all’impulso può essere sempre utilizzato.
In merito alla Funzione di Trasferimento invece le cose cambiano, lo Sweep tende a perdere efficienza in quanto che il sistema media costantemente tutta la banda di frequenze, quindi mentre lo Sweep eccita una sola frequenza alla volta il sistema tende a mediare, parti di basso livello con quelle di alto livello rendendo inoltre instabile la misura in quanto prende dentro anche tutti i rumori ambientali e di fondo della strumentazione utilizzata (con spettri casuali e non costanti), questo comporta inoltre la difficoltà del sistema a definire il corretto Delay tra il segnale di misura e quello di riferimento.
Fig. 6

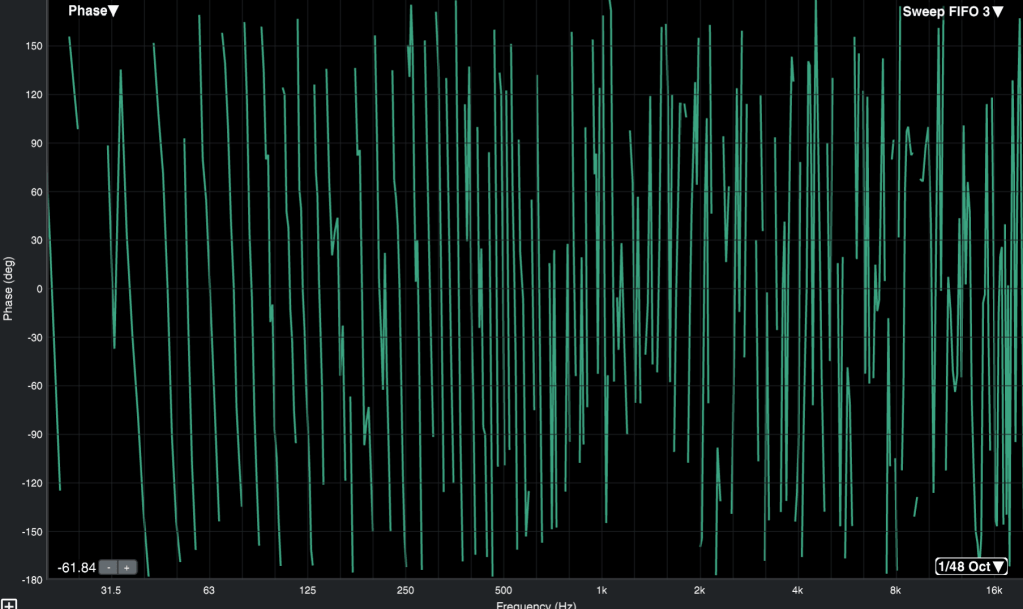
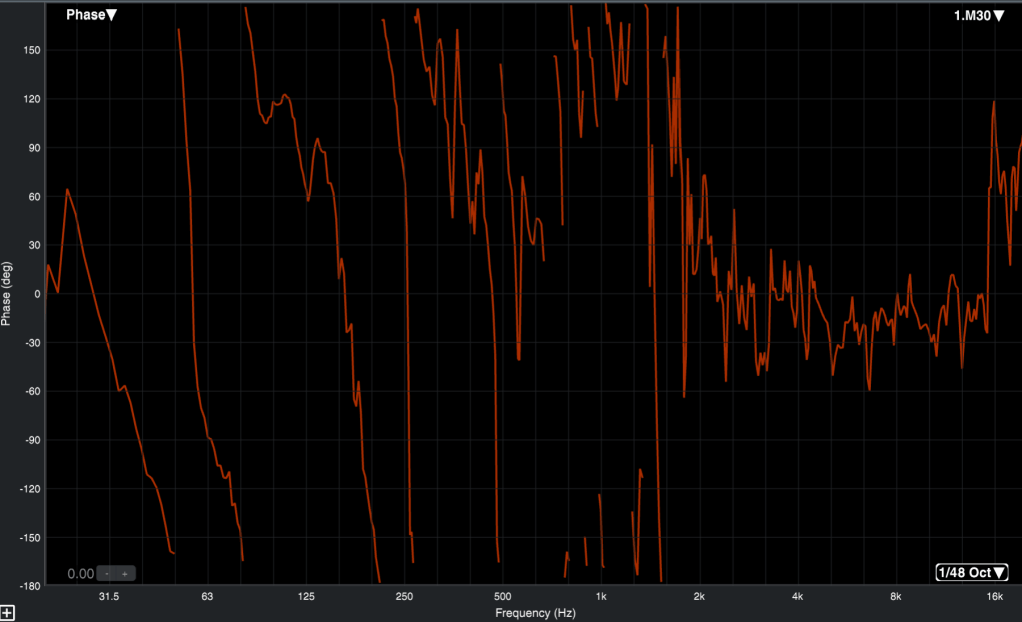
In figura 6 una comparazione tra la risposta rilevata con Rumore Rosa (blu) e SWEEP (giallo), anche impostando il corretto Delay trovato attraverso il Rumore Rosa, lo Sweep non è in grado di definire una corretta misura, molto più “seghettata” con alti valori tra i picchi (come si vede nella risposta Magnitude) e alti valori di sfasamento soprattutto alle alte frequenze (vedi grafico della fase).
In conclusione possiamo dire che il Delay è bene trovarlo con rumore costante (Rosa e Pseudorandom), la Risposta all’Impulso con Sweep (che è piu rapido richiedendo meno operazioni di taratura), la risposta di Fase e Magnitude con rumore costante (Rosa Pseudorandom).
- Preparazione
Si da qui per scontato il settaggio corretto del software come visto in argomento Appunti per P.A. Manager.
Si da qui per scontato che il DSP sia già impostato con filtri e delay definiti in fase di progetto.
La prima cosa da fare ancora prima di rilevare la risposta all’impulso è quella di ottimizzare il livello del segnale di riferimento e misura e la threshold della Funzione di Trasferimento tale da catturare meno rumori di fondo possibile. E’ poi necessario avere un livello di segnale piu simile possibile tra il segnale di misura e quello di riferimento ed abbastanza alto da avere un buon rapporto segnale rumore (in Smaart è indicato dai led Gialli ad un livello di circa -12 dBFS, ma da valutare sul campo), (fig. 7).
Fig. 7

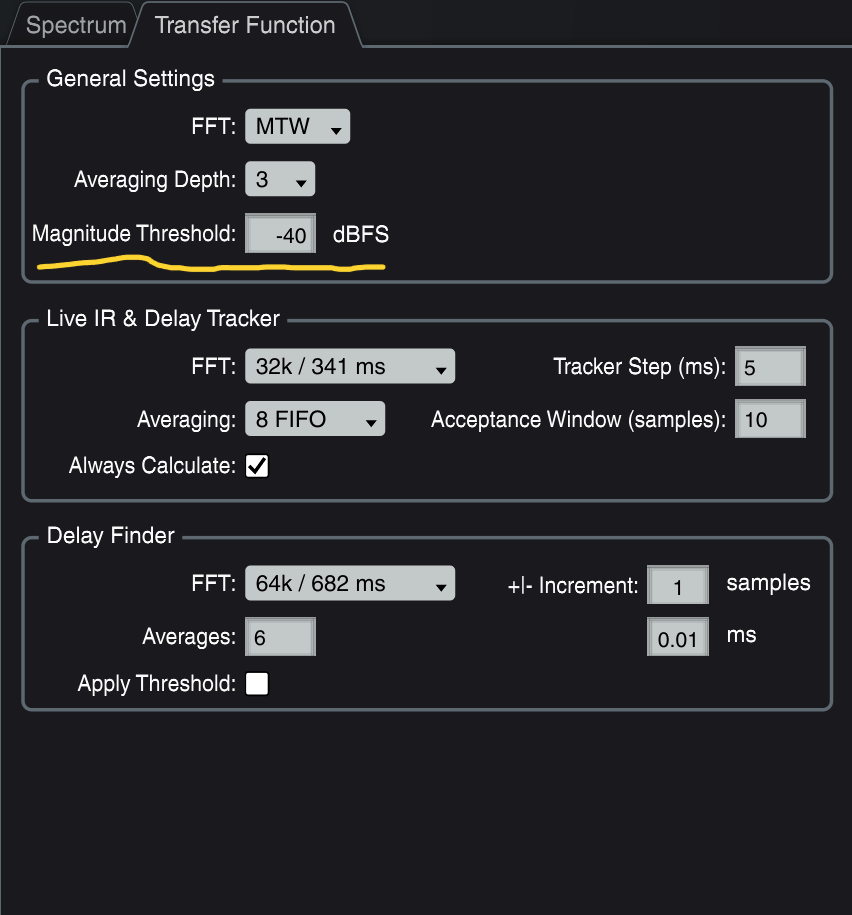
Attenzione a non sovraccaricare il DSP (vedi i – 6 dBFS) per non incombere in errori di misurazione. Anche dal lato del Microfono di misura stesse considerazioni e fare inoltre attenzione a che non vada in saturazione l’ingresso microfonico dell’interfaccia audio utilizzata.
Come ottimizzazione della Threshold si considera un livello tale che anche se attivato il motore dedicato della funzione di trasferimento (quindi comincia a prendere il segnale di misura dal microfono), questo non deve rilevare nulla a livello di curve nei grafici di Fase e Magnitude (si considera un livello di segnale del microfono di misura tarato per mostrare circa i – 60 dBFS che si vedono in figura 7). Se cosi è allora tutto il rumore ambientale e di fondo del sistema rimane sotto. Il segnale audio di test in uscita dal P.A. dovrà quindi avere un livello di rilevamento sopra al livello di Threshold anche nelle sue dinamiche piu basse che quando attivo comincia a determinare le curve di analisi.
Da qui e per ogni misura di Test il livello di segnale inviato all’impianto non deve mai cambiare, cosi da poter eseguire test comparativi utili (quindi posizione dei potenziometri e fader che interessano il segnale di riferimento e misura non devono mai essere piu toccati).
Come seconda cosa sarà necessario allineare temporalmente il segnale di riferimento e quello di misura per cosi avere dati attendibili, comparabili e non incombere in errori di processamento nella funzione di trasferimento sui grafici di Fase e Magnitude. Piu i due segnali sono temporalmente in fase e sincronizzati e piu precisa sarà la misura.
Per quanto riguarda SMAART l’opzione dedicata è il Find Delay, o ancora meglio il Track (fig. 8), che monitora costantemente in modo continuo o fino alla ricerca di un valore stabile il ritardo da applicare.
Fig. 8
Con il Find Delay trovi il delay in modo manuale con un analisi ad ogni click, mentre il Track come detto esegue una misurazione automatica e lo applica automaticamente togliendo un passaggio manuale obbligato.

Per vedere se il ritardo applicato è corretto è necessario guardare il grafico della fase (fig. 9), piu è lineare con meno curve e pendenze e piu i due segnali saranno in fase. Provare quindi a trovare migliore soluzione, anche perchè piu l’ambiente è rumoroso e risonante e piu difficilmente il sistema riesce a calibrare il corretto tempo di ritardo, e questo deve essere aiutato variando l’FFT Size e Media di ponderazione del DSP dedicato.
Fig. 9
In figura 9 la curva di fase verde è senza ritardo applicato, mentre quella rossa con ritardo applicato, si vede ad occhio come la curva sia meno frastagliata e quindi piu precisa ed utile per procedere con la misurazione.
Un maggiore sfasamento è anche indice di una Magnitude che non sarà precisa nel dare risultati utili alla calibrazione della risposta in frequenza.
n.b. Mantenere il Tracking attivo anche per i processi successivi può essere utile in quanto che l’oscillazione dei diffusori stessi per il vento, quindi il vento stesso che incontra la capsula microfonica, interferenze di vario tipo come rumore ecc.. possono indurre a dover rivedere il corretto tempo di ritardo. Può essere inoltre utile per auto sincronizzare il tempo di ritardo quando è necessario spostare il microfono di misura in nuovi punti di rilievo nello spazio senza dover necessariamente eseguire manualmente il processo.
Una volta calibrato il segnale di riferimento con quello di misura si passa al rilievo della risposta all’impulso.
2. Rilevamento Risposta all’Impulso
I dettagli del processo sono spiegati all’interno della Guida Progetto P.A. che troverai come link alla fine dell’articolo System Designer – Line Array – Part – IV.
In questa fase sarà necessario allineare l’intero sistema e farlo suonare il fase.
La risposta all’Impulso in un sistema con Funzione di Trasferimento è rilevata comparando la Magnitude e la Fase dalle quali si estrapola la risposta attraverso un antitrasformata di Fourier. Per questo anche in questa fase sarà molto importante che il segnale di misura e quello di riferimento siano il più possibile temporalmente in fase.
Per il rilevamento del tempo di Delay per il sincronismo del segnale di misura e riferimento utilizzare sempre il Rumore Rosa Pseudoradom che da un risultato più preciso in quanto eccita contemporaneamente tutto lo spettro di frequenze a dispetto di quanto fa lo Sweep e riesce a rilevare cosi piu precisamente e rapidamente il giusto tempo delay da applicare, essendo anche lo pseudorandom un calcolo ripetibile nel tempo.
Utilizzare poi lo Sweep, che da il piu alto rapporto Segnale Rumore, ed eccitando una sola volta per Sweep l’ambiente per ogni singola frequenza, mantiene ben separati rientri, rumori ed echi dalla misura, ottimizzando cosi il rilievo del suono diretto.
Rilevare quindi la risposta all’impulso di ogni singolo sistema da allineare nel proprio punto di sincronismo come da progetto.
Una volta catturati gli impulsi analizzarli e definire i vari tempi di ritardo da confermare o modificare ed applicare al processore.
Fig. 10

Come si vede dalla tabella di figura 10 ci sono due impulsi catturati che secondo il progetto acustico devono essere sincronizzati.
Questa è la finestra di default che generalmente è in modalità vista Lineare, e già possiede molte informazioni che è possibile utilizzare per un corretto allineamento, come si vede la linea verticale (dove c’è la freccia gialla), identifica il picco di segnale (che è quello a cui facciamo riferimento per l’allineamento, in quanto di maggior livello e maggiormente percepito dalle nostre orecchie). In alto a sinistra sottolineato di giallo si vede poi definito anche il ritardo temporale trovato (tra segnale di misura e quello di riferimento sulla base dell’impulso dato).
Avendo come riferimento anche la secondo risposta all’impulso è possibile muovendo il cursore (cerchiato di giallo), muovere l’intera risposta all’impulso e trovare cosi l’eventuale tempo di ritardo da applicare (se già in fase allora non ci sarà bisogno in quanto già ottimizzato come da progetto).
Fig. 11
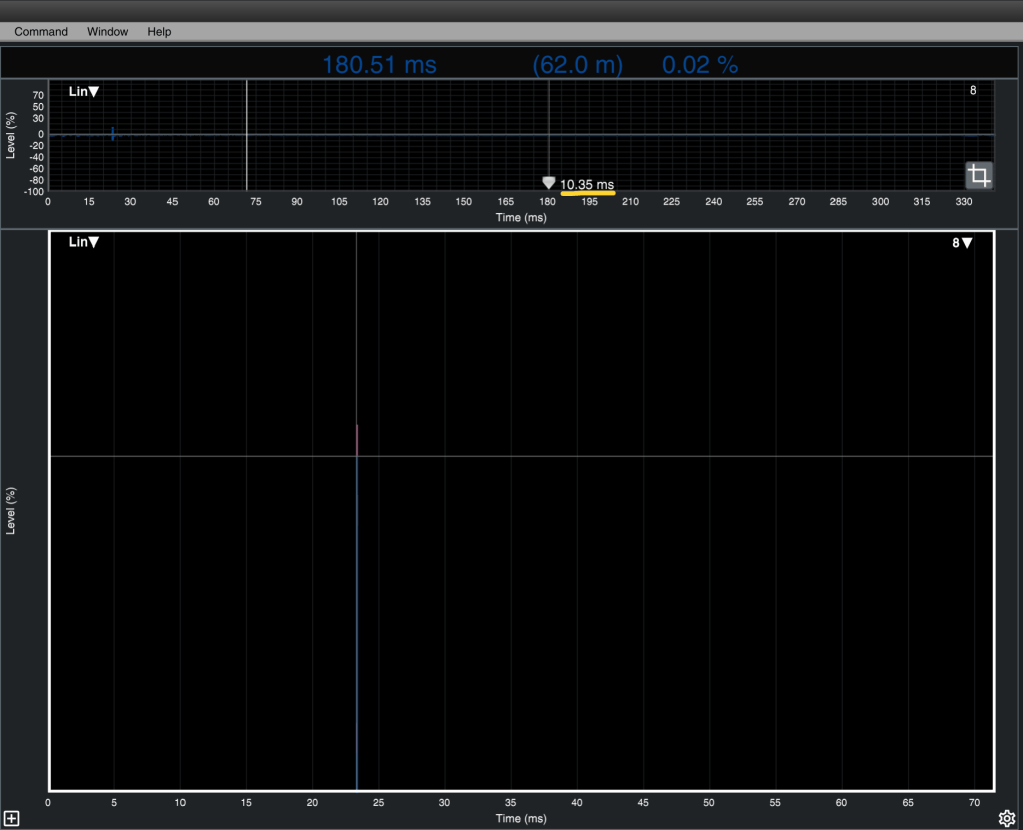
Come si vede in figura 11 è stato necessario applicare 10,35 ms di ritardo. E cosi via per tutte le risposte nei punti da linearizzare.
C’è da dire però che l’allineamento della risposta all’impulso non è detto che sia anche un allineamento di fase, in quanto questo dipende da quanti cicli di distanza si trova l’altro diffusore, e dal suo intrinseco comportamento di fase (naturalmente non lineare).
C’è da dire anche che oltre alla fase e all’impulso c’è da ottimizzare anche il livello come da progetto (al fine di mantenere il giusto rapporto sub-satelliti, rapporto di prossimità, livello di varianza minima media nello spazio).
Per poter far questo misurando meno volte possibili, cosi da risparmiare tempo, e rischiare anche meno errori di analisi, la vista Logaritmica dell’impulso può giocare un punto a favore.
Fig. 12

Come si vede in figura 12 si vedono gli stessi dettagli della misura lineare ma con anche il valore (dB), che indica il livello dell’impulso stesso e da cui è necessario prendere il dato per comparazione.
Quindi in una volta sola si riesce a rilevare il ritardo da applicare e anche la differenza di livello. In questo caso si parla di uno 0, dB e quindi è corretto in quanto nel progetto la differenza di livello doveva essere 0 dB (una piccola tolleranza è sempre accettata in campo reale).
In SMAART e vale sia per il grafico della risposta all’impulso che per quello della fase nella funzione di trasferimento, attraverso il comando CTRL o CMD + Click è possibile modificare la posizione del cursore di riferimento che è quello che si vede impostato fisso sulla linea di impulso blu in figura 9. Ed il suo valore sono i primi 3 valori in alto a partire da sinistra (14,03 ms, 4,8 m, – 16,76 dB), mentre i tre centrali (18,57 ms, 6,4 m, – 51,04 dB) sono i valori del cursore mobile, quindi la posizione del puntatore mouse in tempo reale, i tre valori a destra invece (18,57 ms, 4,54 m, – 34,28 dB) rappresentano le differenza tra la linea fissa e quella mobile in cui ci si trova con il mouse. Grazie a questo è possibile capire immediatamente il tempo di ritardo e la differenza di livello, oppure la differenza di fase.
In alcuni software insieme all’impulso può essere rilevata contemporaneamente anche la Fase, cosa che in questo caso invece è presente nella finestra Funzione di Trasferimento in Smaart e per cui quindi si richiede un nuovo impulso da rilevare.
C’è da dire però che l’impulso Broadband in sé ha poco valore ai fine del rilievo per il progetto acustico, nel senso che finchè sono due sistemi full range da sincronizzare non c’è alcun problema (es. Satelliti Left e Right o Front Fill su stessa banda dei Satelliti, ecc..), ma se la banda è diversa anche la risposta all’impulso sarà differente (es. Sub con Satelliti).
Fig. 123

Come si vede in figura 13 la risposta del Sub (verde) è diversa da quella del Satellite (rosa), questo perchè lo spettro ha un contributo differente di frequenze e come si vede è difficile da poter comparare.
Per risolvere questo problema è necessario filtrare entrambe le risposte alla stessa frequenza (es. la frequenza di crossover che nel caso di taglio tra Sub e Satelliti è quella che deve avere stesso valore energetico e perfetto sincronismo di fase).
Fig. 14
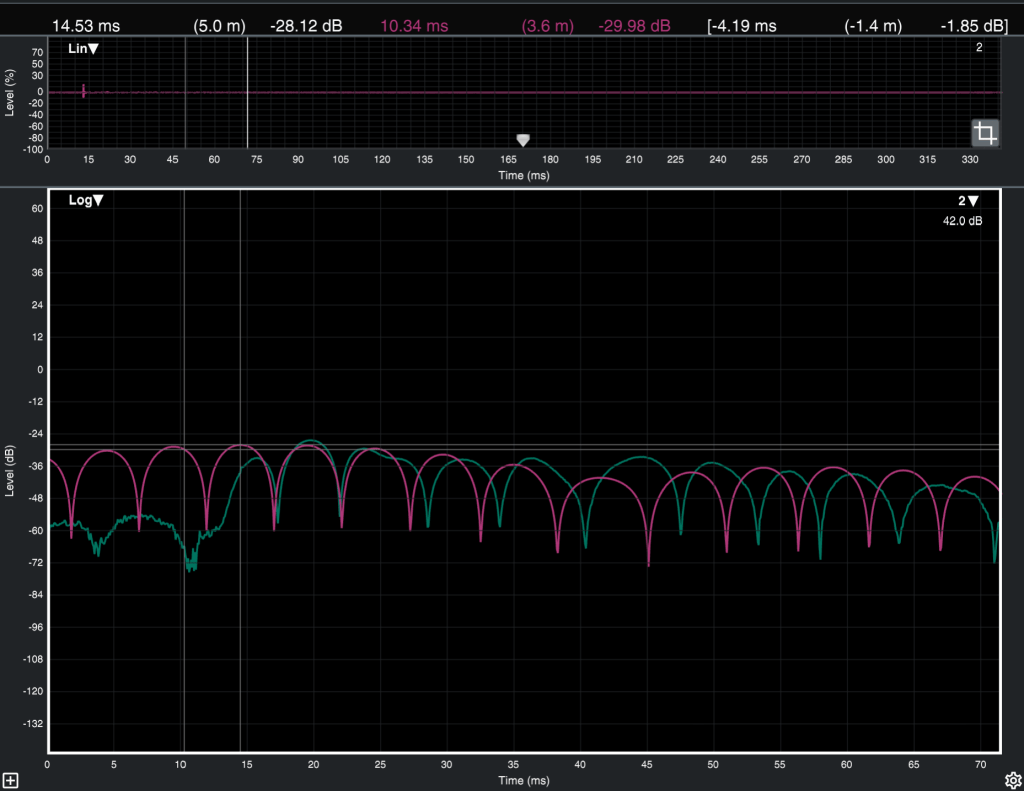
Come si vede da figura 14 avendo filtrato la risposta alla stessa frequenza è piu chiaro poi il tempo di ritardo e quello da applicare.
Se si necessità di modificare il livello è necessario eseguire una nuova misurazione per valutare se ci sono dei cambiamenti sulla risposta.
Se si hanno Sub e altri elementi ritardati sarà necessario rilevare l’impulso anche di questi, tale da capire se il ritardo è mantenuto come da progetto oppure ci sono da fare le dovute correzioni. Questo può essere rilevato sempre dallo stesso impulso come secondo picco, terzo picco, ma da non confondere con gli echi.
Se non si è certi, inviare un impulso separato tra le sorgenti senza ritardo e quelle con ritardo.
Per come è configurato Smaart al momento, per fare analisi sulla calibrazione e taratura impianti audio P.A. è più utile rimanere all’interno della finestra della Funzione di Trasferimento (fig. 15), in quanto che è possibile rilevare contemporaneamente più misure (vedi Fase e Magnitude), e velocizzare quindi i tempi di calibrazione e taratura, mentre nella finestra dedicata alla risposta all’impulso oltre ad analizzare l’impulso stesso non è possibile fare altro.
Fig. 15

Come si vede dalla figura 15 da una sola finestra è possibile cattura contemporaneamente Risposta all’Impulso, Fase e Magnitude che è tutto quello che ci serve per la taratura e calibrazione del P.A. Quindi per i nostri scopi è più consigliato utilizzare questa finestra.
Attraverso poi le impostazioni della FFT Size della risposta all’impulso (fig. 16) sarà possibile aumentare la finestra di analisi, utile nel caso in cui non si riesca a rilevare sull’asse positivo l’impulso o se questo cade sull’asse negativo, il che significa che il suo ritardo è troppo grande e quindi ha bisogno di una finestra di analisi più grande. Farlo cadere su valori negativi (fig. 17) è indice di una non corretta funzione di trasferimento Magnitude e Fase, quindi il sistema andrebbe a pensare di considerare impulsi che hanno un ritardo magari di molti secondi in pochi ms di analisi in quanto ritroverebbe il suo impulso ad esempio a pochi ms (negativi), rispetto al primo impulso rilevato.
Fig. 16
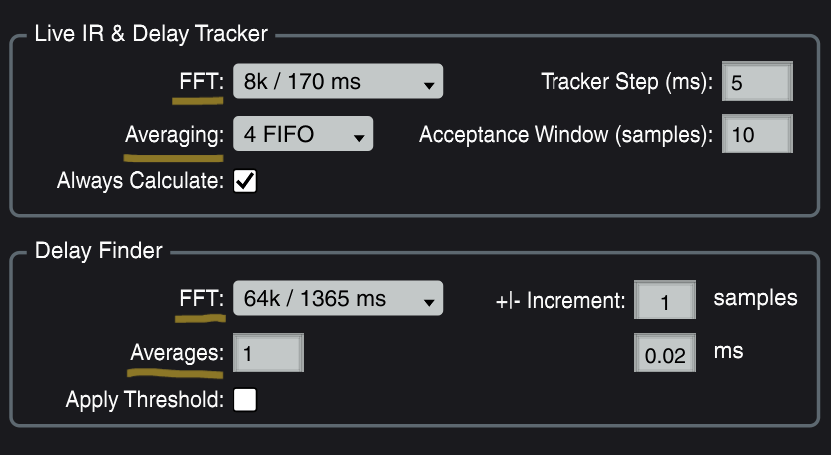
Fig. 17
Come si vede in figura 17 si ha un impulso negativo (a circa -15 ms), e questo è dovuto dal fatto che il suo tempo di ritardo va oltre i 50 ms di questa finestra di analisi e quindi passa alla successiva finestra da 50 ms rientrando come valore negativo (in quanto che l’FFT campiona e mostra ogni 50 ms di analisi per questo caso o tot. ms di analisi secondo l’impostazione data, più grande è il valore FFT e più ogni singola finestra ha un tempo maggiore). Solo che ragionando all’inverso, in quanto che come detto l’impulso è ricavato dall’elaborazione della Fase e Magnitude, questo è indice che l’elaborazione dei segnali è considerata con uno sfasamento temporale che va da – 15 ms a 0 ms, 0 ms che è il tempo di partenza dell’impulso che vediamo al centro (in cui è anche presente il tempo di riferimento per il ritardo tra il segnale di misura e quello di riferimento), mentre in realtà come detto è maggiore di 50 ms, e questo avrebbe un incidenza ben diversa sul risultato. Anche se poi per ritardi molto elevati è possibile far cadere pure l’impulso su valori positivi ma che in realtà indicano un tempo di ritardo molto elevato, ma come vedremo una corretta impostazione di Smaart e le dovute corrette misurazioni permettono di evitare questi problemi.
Per questi motivi è sempre bene fare analisi con Risposte che cadano sui valori positivi, il valore negativo è solo indice di una non corretta misurazione. Questi impulsi poi non è detto che siano l’impianto audio stesso sotto analisi, ma possono anche essere riflessioni ed interferenze, ma che comunque vanno ad impoverire e distorcere la corretta misurazione, quindi se si rilevano impulsi rilevanti (ben definiti e a + di 10 dB rispetto al rumore di fondo, è bene valutare una finestra di analisi temporale FFT più grande.
Un esempio per chiarire il concetto può essere il seguente:
Fig. 18

Come da figura 18 se due impulsi cadono all’interno dello stesso pacchetto FFT allora il risultato dalla mediazione dei singoli pacchetti sarà sempre affidabile in quanto mi dice che il risultato medio è 15 come è 15 l’energia contenuta in ogni pacchetto.
Se il secondo impulso cade fuori dal pacchetto FFT verrà rilevato da un successivo pacchetto, ma la cui quindi mediazione falserà il risultato finale rendendo la misura non più fedele, di fatti in questo caso il risultato è 13,75, quindi sottostima l’energia di ogni pacchetto.
In un contesto reale dove gli impulsi sono tanti e con tempi differenti questo è un problema ed è il principale limite della FFT.
Idealmente ci vorrebbe un FFT Size di infinite dimensioni ma questo è in pratica impossibile per la memoria che occuperebbe ed il tempo che impiegherebbe per l’analisi, aumentando anche il possibile numero di errori per perdita di dati.
Se l’impulso è molto rumoroso ed instabile, per cui non si riesce a catturare un campione chiaro e riutilizzabile, allora aumentare il numero di medie Average.
Stesso discorso per il Delay Finder, se il sistema fatica a trovare il corretto sincronismo tra segnale di riferimento e quello di misura aumentarne i valori. Per quanto riguarda l’FFT questo dovrebbe non essere più piccolo di quello della LIVE IR ottimizzato, altrimenti si rischia di avere impulsi negativi e anche il sistema di rilevazione sincronismo potrebbe avere dei problemi.
Un più alto valore FFT e Averaging inducono anche ad un più alto tempo di analisi e sovraccarico della CPU del computer.
Oltre a questo una corretta rilevazione dell’impulso è data da un chiaro impulso visibile, questo lo si realizza sincronizzando temporalmente segnale di misura e riferimento come prima visto ed il loro livello di segnale (che deve essere più simile possibile, altrimenti ci potrebbero essere falsi picchi di misurazione troppo alti o troppo bassi in cui rientra più rumore o meno rumore).
n.b. Se il segnale di misura è troppo instabile può essere utile utilizzare un leggero e più trasparente possibile compressore su di esso cercando di livellare i picchi il più possibile verso il livello del segnale di riferimento.
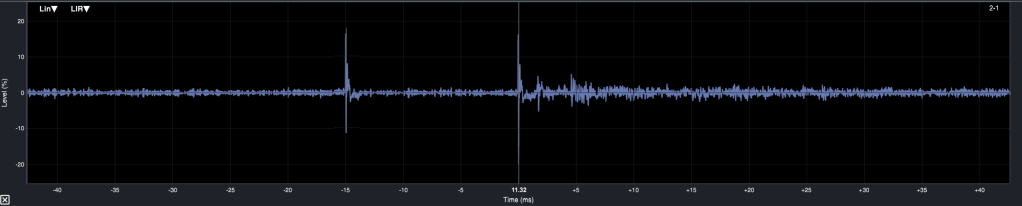
Se si rileva un impulso di questo tipo (fig. 19), è sinonimo di un non corretto tempo di sincronismo applicato tra segnale di misura e riferimento ed un incapacità del sistema di rilevare correttamente l’impulso.
Fig. 19
In figura 19 si vede come ci sia un gran rumore di analisi, da ottimizzare con livello di analisi adeguato (consigliato piu alto di almeno 10 dB rispetto al rumore di fondo ambientale), un ottimizzazione del livello tra il segnale di riferimento e quello di misura (più simile possibile) e da corrette impostazioni FFT e Averaging (in alcuni casi può anche essere dato da un mal funzionamento delle apparecchiature utilizzate).
Nella valutazione della risposta all’impulso è anche fondamentale guardare la fase per capire se il sistema (singolo), sta riproducendo in fase o in controfase ed agire cosi per la correzione di fase prima di procedere con approfondimenti di analisi di sincronismo ed evitare cosi problemi di Sync ed incertezze sulle misure.
Fig. 20
Impulso in fase

Impulso in controfase

Come si vede da figura 20, per capire se è in fase è necessario guardare il livello della prima onda di valore sopra al rumore di fondo (sopra ai 10 dB se la misura è fatta correttamente), se è verso il basso è in controfase, se è verso l’alto è in fase. E’ possibile trovare un onda negativa con picco più ad alto valore rispetto a quella in fase, ma questo è solo sinonimo di un interferenza di fase molto marcata e non di un sistema in controfase.
MTW vs FFT
In base a quanto appena visto si può fare una considerazione sull’utilizzo o meno dell’MTW o FFT per l’analisi della Funzione di Trasferimento.
Una FFT grande ha una risoluzione maggiore, quindi riuscirà a rilevare anche le piu basse frequenze riuscendo a farle cadere all’interno di un unico blocco senza spezzettare creando cosi errori. Al contrario le alte frequenze hanno bisogno di un FFT più bassa per prendere all’interno del blocco meno rumore possibile, necessitando di una più bassa FFT è possibile quindi escludere più rumore ed in più è possibile vedere un segnale più dinamico in quanto che tutti gli impulsi saranno mediati su blocchi diversi ognuno con il suo valore invece di essere mediati come unico impulso all’interno di un unico pacchetto, e questo va a favore di un’analisi dinamica.
Al contrario però se mettiamo una FFT molto bassa è molto più facile che le basse non siano correttamente rilevate e che le alte vengano fortemente troncate cadendo in diversi blocchi FFT con diversi gradi di ponderazione.
La MTW ottimizza questo, adattando la FFT in base al range di frequenza in questione, quindi per le basse un valore più alto e via via a diminuirlo mano a mano che le ottave o terzi d’ottava crescono.
Quindi le basse vengono correttamente riprodotte, le alte hanno una buona dinamica e poco rumore, ma è facile che vengano troncate.
In considerazione del tipo di analisi che dobbiamo fare, quindi come risponde l’impianto ad un segnale costante e continuo, in considerazione del fatto che l’obbiettivo è quello di rilevare il più possibile il segnale diretto cosi da poterlo correttamente processare senza il mascheramento dato dalle interferenze non controllabili ma con la consapevolezza che in contesto reale dobbiamo adattare il suono in uscita dai nostri altoparlanti all’ambiente in cui il suono è riprodotto e per cui questo non può essere escluso ma deve essere considerato (quindi da escludere solo il rumore di fondo), possiamo dire che pacchetti FFT più grandi con un tipo di segnale costante che rimane costante sopra al rumore di fondo è da preferire ad un MTW.
Per altre tipologie di misure come RTA per rilevare la risposta di uno strumento musicale o mix, invece può essere più adatta la MTW in quanto garantisce una visuale molto più dinamica e chiara alla lettura.
3. Controllo della Fase
Adesso che abbiamo confermato o modificato l’allineamento di fase sarà necessario controllare la frequenza di Crossover che si deve trovare in perfetta fase tra i vari sistemi, o quanto meno entro i +/- 60 gradi per tutto il range di frequenza che rimane entro i +/- 10 dB cosi da avere in ogni caso sempre somme e non cancellazioni di fase.
Se non si ha già il grafico della fase automaticamente adattato dopo l’eventuale variazione del tempo e livello, è necessario eseguire uno nuovo rumore alla cattura della grafico di fase dei singoli sistemi sotto analisi.
Analizzare quindi la risposta di fase alla frequenza di Crossover e dintorni per un decadimento di 10 dB (e questo dipende dalla pendenza di taglio, quindi piu è meno pendente e piu la curva di fase deve essere simile per un ampio range di frequenze.
Fig. 21

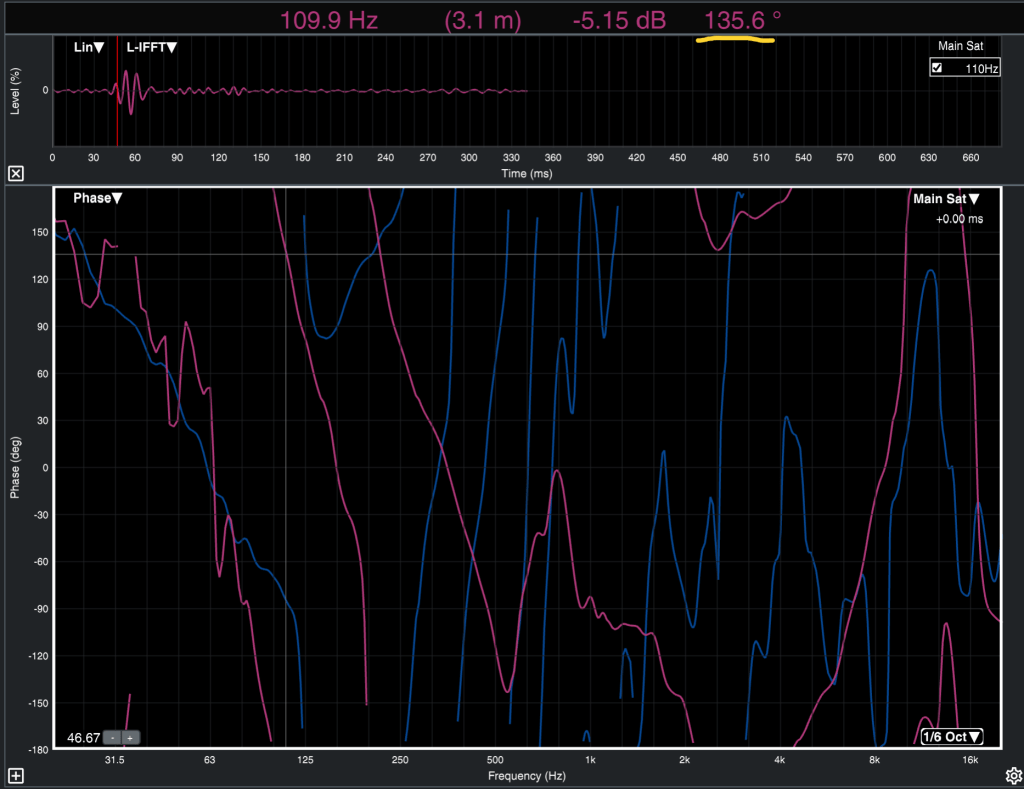
Come si vede dalla figura 21 i due sistemi sono sfasati di 51 gradi circa alla frequenza di Crossover (in questo caso 110 Hz). Per cui sarà da applicare un tempo di ritardo utile per avere la piu ampia anda passante in fase.
Se l’allineamento della risposta all’impulso alla frequenza di Crossover è stato fatto correttamente anche il livello di fase deve essere correttamente in fase, al massimo da rifinire di qualche decimo.
Come anticipato in caso di problemi con l’accoppiamento di fase del crossover, soprattutto per sistemi non compatibili tra loro, può essere necessario a volte invertire la fase dell’uno piuttosto che l’altro oppure per sfasamenti piu contenuti è possibile valutare l’utilizzo di filtri All-Pass Filter per variare la fase senza equalizzare.
Se cosi non fosse probabilmente può esserci anche un problema lungo la catena audio, altoparlanti stessi e finali di potenza inclusi.
Negli esempi appena fatti si è considerato il sistema Sub ed il sistema Satelliti come un grande unico sistema, nella realtà e tempo permettendo dovrebbe essere analizzato Livello SPL e Ritardo Temporale di ogni Satellite e Sub facente parte del progetto per valutare possibili problemi alla singola sorgente e la sua corretta interazione con le altre sorgenti.
Per riassumere i processi di calibrazione, sarà importante che livello e tempo dei vari sistemi combacino come da progetto nel o nei punti di ricezione a cui verrà posizionato il/i microfono/i di misura. Se non combacia ci sono da fare le opportune correzioni (tempo-livello-crossover) per ogni sistema fuori allineamento.
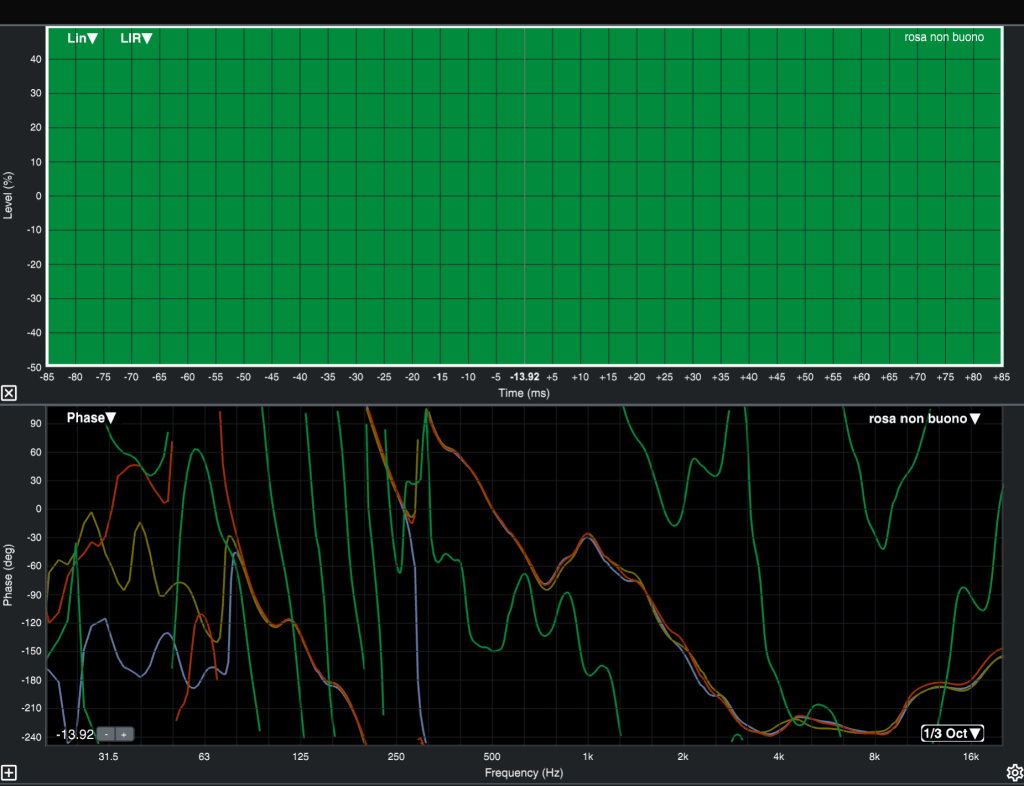
Per quanto riguarda il grafico di analisi della Fase è necessario utilizzare come lo sarà per la Magnitude un grafico non meno di 1/24, per una valutazione più precisa del sincronismo di fase tra segnale di misura e riferimento e quindi successiva più precisa comparazione con altri sistemi, e meno mediata (rispetto a 1/3 di ottava il risultato può variare anche di oltre 60 gradi.
Fig. 22

Come si vede in comparazione delle immagini di figura 22 nella curva 1/3 di ottava la frequenza di 120 Hz (che è quel punto di incrocio tra la riga dell’asse x e quella dell’asse y), è a circa – 120 gradi, mentre nella curva 1/24 la stessa si trova a – 60 gradi, non quindi comparabile.
In considerazione inoltre che il risultato della curva 1/3 di ottava è una maggiore mediazione delle curve nell’intorno della frequenza di interesse, non è nemmeno utile comparare più curve alla stessa bassa risoluzione di 1/3 di ottava, in quanto si potrebbero ottenere dei falsi valori dovuto a possibili diverse mediazioni delle curve.
n.b. Può essere utile in ogni caso comparare diversi tempi Delay trovati per il sincronismo del segnale di misura e riferimento al fine di scegliere quello che da minore sfasamento.
Processo di Correzione Tonale (Equalizzazione)
Una volta Calibrato l’impianto si passa alla fase di correzione tonale, al fine di consentire una media omogenea di ascolto della risposta in frequenza.
Si considera sempre l’utilizzo di un equalizzatore prima dell’ingresso nel processore di segnale cosi da poter bilanciare tutto il sistema ed eventualmente rifinire sistema per sistema con l’equalizzatore in uscita post filtro.
Da progetto abbiamo mediato il livello SPL nell’area di ascolto attraverso la varianza minima, la mediazione della risposta in frequenza è necessario eseguirla sul campo in quanto molto più pratica e realistica da ottimizzare. I software di simulazione acustica di oggi come EASE ed EASE Focus permettono di simulare anche le correzioni tonali da eseguire, ma come già detto anche in altri articoli è buona norma eseguire questo processo sul campo, dove riflessioni, diffrazioni, vento, umidità, e tutti quei fattori che inducono ad una variazione tonale sono presenti e reali.
Se si è fatto un buon progetto di varianza minima anche la risposta in frequenza sarà già di base ottimizzata, solo da rifinire.
In breve si può dire che utilizzando un software di analisi acustica come Smaart Live saranno da catturare le risposte in frequenza nei vari punti ricettori utilizzati nel progetto o ricavati nei vari assi XOVER, ONAX, OFFAX – 3 dB, OFFAX – 6 dB nel caso non vi sia un progetto dietro. Per catturare queste utilizzare la funzione di trasferimento, quindi rilevarle dalla curva di Magnitude (fig. 23), che rappresenterà la differenza tra il segnale di riferimento e quello rilevato dall’impianto. Utilizzare sempre una risoluzione di 1/24 di ottava e per maggiori dettagli rimando all’articolo Appunti per P.A. Manager.
Fig. 23
n.b. Durante questa fase l’impianto audio deve essere sempre tutto acceso e funzionante cosi da avere una corretta risposta di tutto il sistema e dell’ambiente.
Nel caso si abbia poco tempo e quindi da fare delle scelte di misura, è sempre meglio optare per l’analisi sulla linea ONAX che è quella di maggiore interferenza.
Anche per questa fase il livello e tempo del segnale di riferimento e quello di misura deve essere sincronizzati e la media temporale e dimensioni FFT deve essere adeguata per il corretto rilievo di una misurazione stabile.
Per questo ad ogni punto ricettore di rilievo nel posizionamento del microfono, prima di eseguire l’analisi, va tarato livello e tempo di ritardo del segnale di riferimento rispetto a quello di misura, o valutare il Track e controllare sempre attraverso il grafico di fase.
Se si riscontrano anomalie della risposta in frequenza, ad esempio zona di eccessivo livello o eccessivo gap, è necessario valutarne la motivazione e correggerla, ad esempio zone di eccessivo riverbero e zone di risonanza, quindi da correggere l’ambiente o da escludere queste della mediazione di risposta, zone di controfase in cui c’è da rivedere l’allineamento dell’impianto audio, eccessivi picchi di Boost o Cut della risposta alla frequenza di crossover, probabilmente dovuti ad un mal bilanciamento della frequenza di crossover con la fase, un decadimento del livello SPL improvviso prima di quanto ci si aspetta da progetto, forse per una non corretta curvatura dell’impianto od un mal funzionamento di una sorgente, l’importante sarà correggere il problema e per quanto riguarda le interferenze ambientali come il riverbero ed eco, escludere queste dall’analisi per non creare una mediazione sulle interferenze invece che sul segnale audio diretto in uscita dall’impianto, il che induce ad un degrado della curva di risposta dell’impianto a livello percettivo di ascolto, i cui metodi sono descritti anche nell’articolo Appunti per P.A. Manager.
Durante la fase di correzione tonale manuale utilizzare filtri equalizzatori più consoni al tipo di curva da dare, esempio Equalizzatori Grafici, filtri Flat Top e filtri Mesa per curve più dettagliate, filtri Parametrici e Shelving per curve più classiche, rimando all’articolo Equalizzatori per una maggiore comprensione ed utilizzo di questi.
Se nella fasi di controllo c’è ad esempio da allineare il livello della frequenza di crossover, oppure si necessita di un equalizzazione separata tra i vari sistemi, optare per equalizzare in modo indipendente le linee pre o post crossover secondo il routing dato.
Catturare quindi le curve nei vari punti di ricezione utilizzando il Rumore Rosa Pseudorandom , mediare le curve catturare per ricavare la curva media e una volta applicati i filtri di correzione, valutare qualche “suona meglio”.
Come limite di distanza di analisi per evitare di mediare valori di rumore, riverbero, interferenza e risposte non utili e contro producenti, considerare l’ultimo ricettore per un sistema Array ottimizzato, ma anche il tipo di sorgente ed eventuale una non ottimizzazione, valutare sempre di rimanere all’interno di un +/- 6 dB di livello.
Manual vs Auto EQ.
Ci possono essere due tipologie di equalizzazione tonale dell’impianto audio, quella Manuale e quella Automatica.
Quella Manuale necessita di analizzare la curva Magnitude e poi dando Boost e Cut alle varie frequenze attraverso l’equalizzatore utilizzato in base alla curva data si cerca di allineare la risposta dell’impianto a quella del segnale di riferimento.
In questo caso si dovrà avere un riferimento di tutte le curve Magnitude catturate dall’analisi, vedi figura 4, tracciare una linea di risposta media o crearla in automatica se il Software lo consente e poi lavorare su di quella. Se si utilizza un multi microfonaggio è possibile analizzare direttamente la risposta risultante per ogni ricettore di riferimento in cui è posizionato il microfono di misura, se invece si ha solo un singolo microfono è necessario creare una curva di mediazione ed il suo rilievo considerarlo nella posizione di ricezione che offre una curva più simile a quella mediata.
Quella Automatica invece è generalmente un Plugin (es. Waves TRACT), che ha la capacità di interfacciarsi con il software di analisi e da li rilevare la curva Magnitude, catturare le varie curve e poi creare in automatico una curva di mediazione.
Il limite principale dell’Auto-Eq è che non considera gli effetti di riverbero e interferenze, in quanto lui vede la risposta del sistema e ti crea una curva automatica di contro risposta al fine di averne una “linearizzata”, mentre manualmente è possibile escludere questo a priori. Per questo motivo anche in utilizzo di Auto-Eq. è necessario analizzare le curve di Magnitude catturate per i vari punti ricettori e poi successivamente alla creazione della curva automatica, andare ad agire con filtri manuali per ridurre o dare guadagno in rifinitura di possibili mediazioni da interferenza. Mentre per limitare effetti risonanti e gap, è possibile agire con dei limiti di livello (fig. 24).
Fig. 24
C’è sempre da ricordarsi di non lavorare con l’equalizzatore oltre le zone di limite inferiore e superiore della risposta +/- 6 dB della sorgente per evitare di aumentare lo stress ed il livello di distorsioni. Per l’Auto-Eq. è possibile agire inserendo dei limiti di equalizzazione per cui il sistema non terrà conto della risposta sopra e sotto i limiti impostati (fig. 24).
In entrambi i casi e soprattutto se non si utilizzano filtri a fase lineare è bene monitorare anche il grafico della Fase durante il processo di equalizzazione, se ci sono improvvisi sfasamenti soprattutto nell’intorno della frequenza di incrocio tra Satellite e Sub ma anche tra stessi altoparlanti interni alla sorgente satelliti che sia ad amplificazione separata o in utilizzo di crossover integrato, ad esempio tra medi ed alti è bene limitare l’utilizzo del filtro in quella sezione, altrimenti sarà necessario rivalutare le frequenze di taglio.
E’ sempre buona norma rieseguire l’analisi della Magnitude per ogni punto ricettore prima utilizzato al fine di comparare la vecchia risposta con quella nuova ottimizzata e fare le dovute valutazioni per eventuali rifiniture.
Il ripple di risposta media accettabile della curva Magnitude deve arrivare ad essere contenuto entro i +/- 6 dB.
In caso di problemi che non consentano la corretta taratura, è necessario indagare sulla possibile causa e soluzione. Ad esempio un posizionamento scorretto dei sistemi diffusori, un cavo invertito di fase o mal funzionante, un setup di impostazione lato software errato, un mal posizionamento del microfono di misura, ecc..
Per quanto riguarda la dinamica questo è un fattore ben più difficile da misurare e tarare, in quanto che è una risposta che dipende dall’impulso del segnale audio e dalla risposta dei componenti della catena audio a questo impulso per cui si lascia la corretta riproduzione della dinamica alla fase di mix.
Il Rumore SMPTE è comunque un tipo di rumore più indicato e preciso anche per l’aspetto della risposta in frequenza dinamica rispetto al classico Rumore Rosa, ma come detto l’algoritmo non è ottimizzato per la misurazione della Funzione di Trasferimento.
Non utilizzare plugin dinamici per equalizzare in quanto che non enfatizzano o attenuano in modo costante la risposta dell’impianto, producendo differenti risposte in frequenza in base al tipo di segnale di ingresso.
Il processo di linearizzazione della risposta in frequenza dell’impianto audio non è in base alla sorgente sonora ma deve essere una costante di trasparenza e per questo l’equalizzatore più adatto è quello statico.
Una volta impostata la giusta equalizzazione sarà necessario visualizzare se effettivamente questa abbia portato ad una linearizzazione ottimale della risposta in frequenza e per fare questo è necessario analizzare nuovamente tutti i ricettori e rilevarne la risposta media. Se non si è ancora arrivati ad una risposta ottimale entro i +/- 6 dB di tolleranza agire nuovamente con l’equalizzazione e analizzare nuovamente le varie posizioni ricettori. Nel caso non si abbia tempo per fare questo tipo di taratura analizzare come punto di riferimento il ricettore di calibrazione, quindi quello utilizzato per l’allineamento temporale, di fase e livello.
In caso di Auto EQ. c’è da considerare il fatto che ad esempio in SMAART la funzione di trasferimento Magnitude è catturata tramite ponderazione MTW che ne migliora la leggibilità da parte dell’utente senza perdere informazioni rilevanti, e questo può essere utile in caso si debba fare un equalizzazione manuale cosi da vedere chiaramente tutti gli aspetti della forma d’onda alle varie frequenze.
Se però l’equalizzazione è decisa dal software e quindi una Auto Eq., è molto più utile e preciso per un risultato più ottimale utilizzare una media delle curve ed un processo di Auto equalizzazione usando finestre FFT. Il cui valore deve essere non inferiore a quello utilizzato per il rilievo della Risposta all’Impulso e non inferiore a 32K per rimanere preciso anche in bassa frequenza.
Considerazioni sulla Curva EQ. media
Per quanto riguarda la risposta di equalizzazione media c’è una considerazione da fare che è quella per cui soprattutto in ambienti difficili è possibile ritrovarsi con diverse misure della risposta catturata con curve molto diverse l’una dall’altra.
Ad esempio in ambienti molto riverberanti, riflettenti e risonanti con numerosi ostacoli diffrattivi è possibile ritrovarsi con curve ad alto contenuto risonante e curve in controfase, per cui una ponderazione media di queste curve tenderebbe solo a peggiorare sia l’ascolto nella posizione di ripresa della prima curva che in quello della seconda. Quindi la curva di equalizzazione media non è da prendere come assoluta per la risoluzione dei problemi tonali.
Ad esempio se la prima curva ha una risonanza ha + 10 dB e la seconda curva ha una controfase a – 10 dB nella stessa banda di frequenze, avremo una curva media tendente a 0 dB. Quindi i problemi sia nella prima curva che nella seconda vengono mantenuti.
C’è quindi da fare una considerazione, o si migliora il progetto acustico di installazione e configurazione Array, oppure si agisce in primis sulla correzione ambientale, cosa che in entrambi i casi non è sempre possibile e spesso limitato dalle condizioni in cui ci si trova ad operare.
La linea guida giusta è come prima cosa quella di creare la curva Eq. media e valutare poi l’entità della differenza di livello per le singole curve catturate per andare a mediare manualmente la ponderazione in Boost o Cut. Ad esempio è utile considerare il fatto che risonanze nella banda dove il nostro orecchio è più sensibile sono maggiormente percepibili e fastidiose, definire una priorità di ascolto in base a dove il pubblico paga un prezzo maggiore del biglietto e quindi è più sensato che l’ascolto sia in quella posizione più trasparente, o in base a dove l’audience è maggiormente concentrata, o ancora in base all’effetto di rientro sul palco, e quindi lavorare sulla curva media ottenuta creando una curva media personalizzata.
Questa è in ogni caso una buona linea guida da seguire sempre, in quanto la differenza tra una ripresa in campo vicino ed una in campo lontano avranno curve tendenzialmente sempre molto diverse soprattutto in ambienti al chiuso.
In una situazione complessa, ad esempio con la presenza di Parterre, Gradinate/Balconate Frontali e Laterali, è consigliato creare delle curve medie per settore ad esempio media delle curve rilevate per il Parterre, media delle curve rilevate per le Gradinate/Balconate Frontali e media delle curve rilevate per Gradinate/Balconate Laterali. Cosi facendo è possibile comparare i vari settori, e creare delle curve di equalizzazione dedicate (nel caso ci sia la possibilità di un processamento tonale in modo indipendente verso il DSP dedicato all’amplificazione di quel settore isolato, e per questo durante la fase di progettazione è bene tenerne conto).
Sarà cosi possibile inoltre rilevare ed isolare problematiche settore per settore, tali da non dover mediare un processamento verso un settore già ottimizzato.
Creare comunque anche un curva media complessiva di tutte le misurazione sempre per avere una chiara idea del comportamento tonale ed agire con un processamento unico totale se non si ha la possibilità di averlo separato.
n.b. La media totale NON deve essere la media delle singole curve, ma la media delle medie di ogni settore, cosi da evitare di ritrovarsi con una curva media che è a favore verso il settore dove sono state fatte piu misurazioni.
Che sia un equalizzazione Manuale o Automatica sarà necessario in questo caso agire in modo indipendente sui DSP dedicati divisi per settore.
Considerazioni
In un progetto speculare “simmetrico”, anche la misura può essere tale, quindi è possibile misurare i ricettori solo da un lato dell’impianto P.A. (es. il Right), e tendenzialmente si ha già il risultato che si avrebbe anche misurando il Left (anche se questo in ambiente reale dipende molto dai rumori costanti e casuali presenti, dall’ambiente stesso e condizioni ambientali), ma in ogni caso può essere utile per velocizzare il processo di misurazione, calibrazione e taratura.
Se invece il progetto è asimmetrico allora è bene misurare e dividere il settore Left dal Right e da altre vie utilizzate.
Lo stesso vale per un progetto 3D, in cui si considera il Centro (Front) come parte centrale di un progetto speculare simmetrico o asimmetrico.
Riassumendo un po tutto quello che abbiamo visto, di seguito una linea guida dei processi per la calibrazione e taratura con Smaart:
Preparazione
In SMAART per la Transfer Function utilizzare una FFT 32K minimo come generale e 16K per la Impulse Response come finestra di ponderazione e partire con un Average FIFO 3, guardare quindi la risposta di Fase ed Impulso, se gli impulsi rilevanti (+/- 10 dB rispetto al rumore di fondo) cadono all’interno della finestra temporale dell’impulso con valori positivi va bene, altrimenti aumentare l’FFT dell’Impulse Response fino a farle cadere al suo interno (no valori negativi), (vale lo stesso per misurazioni successive ad esempio per i Delay Tower, è possibile quindi aumentare la finestra anche successivamente alle prime misurazioni più ravvicinate, l’importante è che la misura in corso sia temporalmente positiva). Se l’impulso non è chiaro e stabile aumentare l’Averaging della Impulse Response. Al contrario se i valori sono troppo stabili e il tempo è chiaramente contenuto entro pochi ms, è possibile calare entrambi i valori per velocizzare il processo ed escludere maggiori interferenze. Anche gli echo e riflessioni ambientali di valore dovrebbero cadere all’interno dei valori positivi per una corretta misurazione della Funzione di Trasferimento in generale.
Contemporaneamente si guarda anche il grafico della Fase ad 1/24, e si cerca un Delay Tracker che dia il minore sfasamento possibile. Per il monitoraggio dello sfasamento tenere sempre in considerazione solo la banda utile fino alla frequenza di crossover, sotto o sopra la frequenza di crossover o la linearità del sistema, uno sfasamento instabile potrebbe essere sempre presente e non valutabile. Se in un sistema Broadband si fatica a trovare stabilità di Fase in bassa frequenza, aumentare il livello Average della Funzione di Trasferimento.
Se si fatica a trovarlo, quindi non si ottiene uno sfasamento stabile ed una risposta all’impulso chiara, provare ad aumentare i valori FFT e Averaging del Delay Tracker. In generale l’FFT del Delay Tracker non dovrebbe essere più piccolo di quello dell’Impulse Response. Per essere una risposta all’impulso valida da cattura deve essere ben definita e quanto meno a + 10 dB rispetto al rumore di fondo e non un “rumore” di onde o a livello del rumore di fondo.
Tra le prime cose da fare prima di procedere alla taratura è quella di ricordarsi di guardare sempre la fase dell’impulso per capire se il singolo sistema sta riproducendo in fase o in controfase. Guardare la prima onda con livello superiore a quello di fondo (es. + 10 dB), se verso l’alto è in fase se verso il basso è in opposizione di fase. Se l’onda negativa è a più alto livello di quella positiva è sinonimo di forti interferenze distruttive e non di onda in controfase.
n.b. Impostare il livello di Threshold della Funzione di Trasferimento tale da non catturare campioni dei rumori di fondo (ottimizzato quando la fase e la magnitude non danno risultati). Assicurarsi quindi che il livello del segnale di Test sia oltre la soglia di Threshold anche nelle dinamiche piu basse.
Utilizzare il Track del Delay Finder per mantenere sincronizzati segnale di Riferimento e quello di Misura, nel mentre guardare l’andamento della Fase e definire quello che da meno Righe ed Ondulazioni (piu lineare e più è in fase).
Se si fatica a sincronizzare il livello del segnale di riferimento con quello di misura perchè troppo instabile, può essere utile inserire un compressore di livellamento per i picchi del segnale di misura al fine di livellarlo e stabilizzarlo il più possibile prossimo a quello di riferimento.
Impulse Response, Livello e Fase
In Smaart utilizzare finestra Impulse Response (nella finestra Funzione di Trasferimento) per il rilievo degli impulsi poi da sincronizzare, utilizzare il filtro alla frequenza di crossover per un piu preciso allineamento di fase. Dalla stessa finestra impostare visuale modalità LOG per analizzare e sincronizzare anche il livello.
Sub e linee di ritardo devono essere misurate (es. dal primo impulso dei Sub si deve rilevare anche il ritardo di quelli ritardati o li si misura a parte e poi li si compara.
Analizzare poi la correlazione di fase alla frequenza di crossover. Utilizzare un All Pass filter per correggere eventuali sfasamenti tale da non modificare il sincronismo temporale già ottimizzato.
La correzzione temporale della fase va valutata per essere la più piccola sia come tempo Delay che come differenza tra i vari sistemi. Ad esempio se è il Satellite ritardato rispetto al Sub valutare di abbassare il ritardo del Satellite piuttosto che aggiungerne al Sub.
Per il monitoraggio della fase è necessario utilizzare una risoluzione non inferiore ai 1/24 (rispetto ad 1/3 può variare anche di oltre 60 gradi), cosi da essere più precisi.
Equalizzazione
Se si è precedentemente ottimizzato FFT e Averaging per un corretto rilievo, in questa fase non saranno necessari ulteriori accorgimenti. Nel caso si usi una Auto Equalizzazione, è possibile essere più precisi rispetto ad un controllo manuale e quindi utilizzare finestra FFT con ponderazione non meno di quella utilizzata per il rilievo della Impulse Response, e non meno in generale di 32K per rimanere precisa anche in bassa frequenza. Se invece l’equalizzazione è fatta manualmente può essere più utile mantenere una visualizzazione con ponderazione MTW ma meno precisa in alta frequenza.
In rilievo della curva di Magnitude tenere sempre attivo il Delay Tracker cosi da auto allinearsi ad ogni spostamento del microfono (guardando sempre il grafico della fase per valutare il buon sincronismo) e una volta creata la curva Eq. Media analizzare la differenza di risposta delle varie singole curve e fare le dovute considerazioni per personalizzare la curva media (ad es. se una curva è molto risonante e l’altra ha molta attenuazione valutare in base all’audience, al ritorno sul palco, alla sensibilità del nostro orecchio quanto lasciare alla mediazione e quanto aumentare o ridurre).
Questo perché ad esempio se nella stessa banda ho un + 10 dB in una curva e – 10 dB nell’altra, la curva media sarà 0 dB mantenendo il problema sia nella prima curva che nella seconda.
Nella fase di equalizzazione il sistema deve essere tutto acceso, come priorità di analisi misurare l’ONAX di ogni sistema a varie distanze, Main L, Outfill L, Delay Tower 1, 2,…L, Front Fill L e poi ricavare una curva media divisa per settore (Main, Outfill, Delay Tower, Front Fill) equalizzabile in modo indipendente, se si ha tempo misurare anche i piani XOVER e OFFAX.
Nel caso si possa utilizzare un’unica curva di equalizzazione, equalizzare la curva media delle curve medie di ogni sistema, cosi da evitare di ponderare la curva a favore del settore con più misurazioni.
Per ogni misurazione sarà importante monitorare sempre la risposta all’impulso che non generi impulsi su valori negativi con valore entro i +/- 10 dB rispetto all’impulso principale, per cui in questo caso si necessita di allungare il tempo FFT della finestra di analisi Generale (e questo può essere dedotto impostando la FFT dell’Impulse Response allo stesso livello di quello della Magnitude, ma che in ogni caso se utilizziamo minimo i 32K raccomandati, siamo certi che questo artefatto non si verifica fino ad oltre 340 ms di ritardo (quindi coperti per la maggior parte degli eventi). Se la misura è fatta in MTW bisogna accertarsi che anche le più alte frequenze rimangano all’interno della finestra temporale nella Impulse Response. Può essere utile comparare la risposta rilevata dal Rumore Rosa con quella da Rumore SMPTE e valutare quale “suona” meglio.
Se si utilizzano filtri non a fase lineare è utile mantenere controllata la fase durante il processo di equalizzazione (quindi analizzare la fase ad ogni nuovo impulso per il monitoraggio dela calibrazione).
Utilizzare sempre un grafico a 1/48 di Ottava per essere più precisi nella fase di equalizzazione automatica, mentre da 1/24 in giu per l’equalizzazione manuale in base a quanto più dettaglio e chiarezza si riesce a lavorare.
Considerazioni Finali
Per un progetto speculare misurare solo un lato dell’impianto (es. Right), il lato Left sarà la copia, risparmiando cosi tempo di Taratura.
In caso di Gradinate/Balconate, misurare campioni di risposta e mediare le curve in modo separato tra Parterre, Gradinate/Balconate Fronte, Gradinate/Balconate Laterali, cosi da poter processare i settori in modo indipendente se necessario. Mediare anche tutte le curve per avere una curva media generale (nel caso si possa utilizzare una singola curva di equalizzazione NON mediare ogni singola curva rilevata ma mediare la media delle curve dei settori, per non avere una mediazione a favore del settore con piu misurazioni).
Note di Calibrazione
Una risposta all’impulso con grafico lineare verso il basso è sinonimo di inversione di fase (fig. 25), quello in fase è sempre verso l’alto (in caso opposto capire se è un problema dell’impianto, del cavo, del DSP o altro, attraverso l’analisi dei singoli elementi della catena audio). Mentre una forte ondulazione della risposta è sinonimo di rumore e riflessioni ambientali da correggere quindi architetturalmente, o agendo direttamente sulla dispersione polare dell’impianto audio scelto.
Fig. 25

Per il tempo di ritardo nella Funzione di Trasferimento, se il ritardo è positivo allora il segnale di misura è in ritardo rispetto a quello di riferimento, se il ritardo è negativo allora il segnale di riferimento è in ritardo rispetto a quello di misura.
Se in un sistema stereo tra il solo Left e solo Right c’è una discreta differenza RTA, ma questo è valido anche per configurazione 3D e con più sistemi distanziati, con Out Fill, Down e Front Fill e Delay Tower, è necessario calibrare separatamente l’equalizzazione del sistema in modo che i due sistemi abbiano una risposta il più possibile simile, a favore di quella più lineare o di curva ricercata.
n.b. Proprio per questo motivo può essere buona norma in fase di controllo del livello SPL analizzare anche la risposta in frequenza RTA di ogni sistema installato e questo deve essere tendenzialmente simile alla risposta ottimizzata degli altri sistemi sul punto ricettore di analisi.
Nella regolazione dell’equalizzazione rilevare picchi e buchi, picchi a larghezza di banda più ampia saranno più rilevabili all’ascolto rispetto a picchi a larghezza di banda più piccola soprattutto in alta frequenza. Tanto più in alto ci spostiamo con la frequenza e tanto meno larghezze di banda strette saranno percepite in quanto il nostro orecchio ha meno risoluzione ed è quindi possibile agire con filtri più dolci.
In fase di equalizzazione manuale nella lettura della risposta in frequenza è possibile leggere le zone di percezione tonale-spaziale ed eco (la zona tonale in cui dovremo agire è quella in cui picchi e buchi hanno un combing distanziato di 1/6 di ottava o meno, da 1/6 di ottava a circa 1 /24 di ottava è possibile rilevare la zona spaziale, quindi in cui agendo è possibile migliorare la sensazione di spazialità, per filtraggio con larghezze di banda oltre 1/24 di ottava è possibile rilevare echi e riflessioni (fig. 26) ed è utile non lavorarci al fine di non equalizzare e mediare una risposta in base all’eco. Ragionare come riferimento medio per bande critiche a 1/6 di ottava, agire con l’equalizzatore dove le alterazioni sono maggiori di 1/6 di ottava. Utilizzare una scala logaritmica per ottenere una visione più chiara di quanto spiegato.
fig. 26

Ci vorrebbe un equalizzatore per ogni diffusore in modo da calibrarlo perfettamente. In caso di utilizzo di DSP con possibilità di equalizzazione per ogni singolo canale di uscita, è possibile utilizzare questi per rifinire le equalizzazioni delle singole sorgenti prima di analizzare la risposta del sistema nel suo complesso.
Con una forte presenza del palco può essere buona norma sincronizzare temporalmente il suono proveniente dal palco con quello del P.A. eseguendo test sui ritardi temporali delle sorgenti naturali che arrivano dal palco.
I problemi esterni rilevati dall’analizzatore o non rilevati ma percepiti, come ad esempio Comb Filtering tra microfoni, eccessivo rientro monitor di palco sia sui microfoni che per via diretta, devono essere considerati arbitrariamente e corretti quando e quanto possibile dal fonico direttamente dal mixer.
Spostare fisicamente un Sub non è sempre uguale ad applicare un ritardo corrispondente, dipende dai punti di riflessione ambientale e la posizione in relazione alla copertura polare incide in qualche modo sulla distribuzione SPL (da ottimizzare quindi in base alla posizione).
Esempio Grafico
Di seguito vediamo alcuni esempi grafici di misure fatte in contesto reale.
Fig. 27
In figura 27 dalla Magnitude Response è possibile notare la differenza di risposta di 3 misurazione di un sistema P.A., Campo Vicino (linea Viola), Campo Medio (linea porpora) e Campo Lontano (linea rossa), come ci si aspetta si nota un calo del livello SPL ed una differente risposta in frequenza data dalla presenza ambientale. Come curva di risposta per l’equalizzazione si prendere la curva media (linea blu).
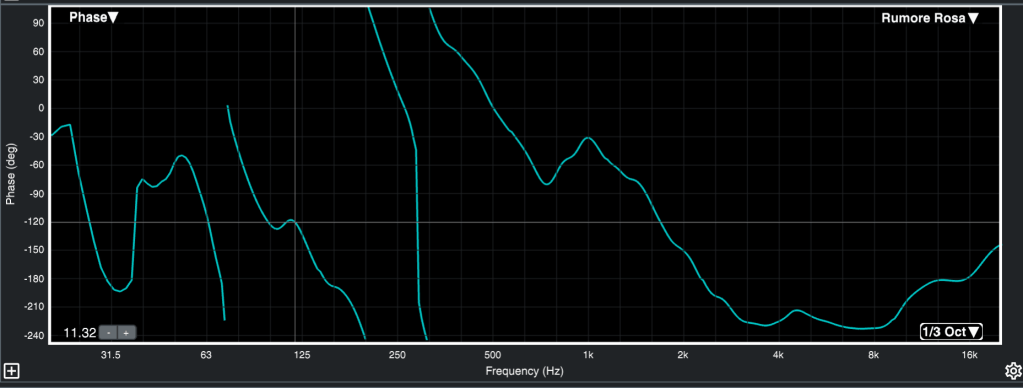
Dal grafico della risposta di fase anche qui si nota che mano a mano che ci si allontana e più ritardo di fase si ha, e questo è normale dovuto ai ritardi indotti dall’ambiente, anche qui il riferimento sarà la curva Average.
La curva di equalizzazione ottimale dovrebbe avere un Ripple contenuto entro i +/- 3 dB.
Una volta ottenuto questo sarà necessario inviare un brano musicale di riferimento e rilevarne a sua volta l’andamento della funzione di trasferimento ed effettuare opportune correzione di bilanciamento tonale correttive, e questo può essere un bilanciamento soggettivo, quindi a descrizione del tecnico, in quanto la linearità di risposta non è detto che abbia un suono trasparente e definito in quanto dipende fortemente dal tipo di mix e da come questo è stato mixato in base alla taratura dell’impianto che aveva lo studio di registrazione o mastering. Stessa cosa per la risposta stessa del mix live in utilizzo di componenti di processamento di segnale che potrebbero a loro volta non essere lineari.
n.b. Nella cattura delle varie forme d’onda di risposta della Magnitude come si può facilmente intuire più ci si allontana e più la curva di livello sarà attenuata in quanto energeticamente più attenuata, questo in fase di Average per trovare la curva di risposta media, comporterà una curva media non solo di risposta in frequenza ma anche di livello (fig. 28) e questo potrebbe sbilanciare il progetto di varianza minima ed equalizzazione media. Per questo una volta definita la curva di compensazione tonale sarà necessario bilanciare il livello allo 0 dB prossimo, quindi un livello di equalizzazione con curva che passa per la linea di 0dB (fig. 29).
Fig. 28

Fig. 29

Processo di Correzione Tonale Post (Taratura Live)
Una volta finita la taratura dell’impianto audio posizionare microfono di misura lato Regia F.O.H. per la taratura Live, per il monitoraggio del sistema durante la performance, alla ricerca di possibili anomalie che se posizionata centrale è una linea prossima a quella XOVER). Questo a meno che non si riesca a lasciare il microfono posizionato in una linea ONAX che come detto è quella dove le interferenze sono maggiori e quindi la migliorare per la taratura. Per il multi microfonaggio anche li è da vedere quanti microfoni si riescono ad utilizzare anche durante l’evento, ma nello stesso punto od in prossimità di esso meglio usarne solo uno.
In questo caso la modifica del curva di equalizzazione e processamento, sarà da prendere valutando sempre il sistema in modo oggettivo, cioè in regia F.O.H. non si ha più il riferimento (a meno di non riuscire ad avere dei microfoni di misura posizionati), del sistema Main ONAX, OFFAX, Front Fill, Out Fill, Delay Tower ecc…per questo si considera e presuppone che dal sistema prima ottimizzato, una variazione della risposta misurata in regia F.O.H. sia una variazione comune.
Per un ottimo setup di partenza una volta calibrato e tarato l’impianto, analizzare la Magnitude in posizione regia e durante l’evento valutare campioni di comparazione di risposte catturate al fine di mantenere una curva il più possibile simile.
Durante l’esibizione sarà utile controllare l’andamento della risposta in frequenza Magnitude prendendo sempre campioni di risposta e anche della fase, al fine di effettuare correzioni di rifinitura, in quanto che il cambiamento di stato dell’aria, umidità, la presenza di pubblico, l’efficienza stessa degli altoparlanti e della strumentazione tecnica utilizzata farà subire cambiamenti alla risposta.
In questo caso il segnale di riferimento sarà il Mix in uscita dal Banco di mixaggio.
Agire con i filtri di equalizzazione sempre e solo in modo manuale, in quanto che l’automatismo non è prevedibile e va a creare nuove curve di risposta, mentre in questo caso è necessario solo una correzione della già mediata curva di risposta.
Monitorare sempre la fase per riscontrare eventuali problemi dovuti al processo di equalizzazione o instabilità del sistema, che non è detto che sia solo l’impianto audio ma anche l’hardware utilizzato in tutta la catena audio di analisi e di mix.
In questo caso potrebbe essere anche utile utilizzare più linee di riferimento invece che solo quella di Mix, ma anche quella in uscita dal processore di segnale, dall’equalizzazione hardware e tutti quei componenti intermedi nella catena audio di analisi, cosi che in caso di problemi hardware si può arrivare facilmente a capire di quale hardware si parla.
Per il rilievo della fase e tempo è bene prima dell’evento rilevare il tempo di ritardo del sistema al punto di regia in cui viene installato il microfono di misura, cosi da avere un riferimento base per eventuali modifiche al tempo di ritardo tra le sorgenti durante l’evento (nella maggior parte dei casi questo sarà limitato al solo P.A. Main in quanto le altre sorgenti saranno maggiormente mascherate al punto di regia).
Per quanto riguarda il rilievo SPL farlo sempre con ponderazione C, come da Calibrazione e con tempo di integrazione Slow a simulare l’ascolto di un suono per tempo prolungato come precedentemente accennato.
Software di Simulazione vs Ambiente Reale
Anche se si effettuano misure accurate è possibile ritrovare più o meno differenze rispetto alle previsioni ottenute dal Software di Simulazione acustica, questo oltre legato come detto più volte in questa serie di articoli alle differenze ambientali che si ritrovano poi sul posto rispetto agli elementi definiti all’interno del software e alla risoluzione e qualità dello stesso, oltre alla strumentazione reale poi utilizzata, queste differenze possono essere legate anche dal tipo di Rumore utilizzato. Ad esempio se nel Software ho utilizzato un classico Rumore Rosa AES52, ma poi in ambiente reale utilizzo un SMPTE Noise, è molto probabile che il risultato sia diverso.
In generale la differenza non deve essere eccessiva, ma in ogni caso in campo reale non affidarsi alla risposta in frequenza data dal Software più che altro utilizzato per creare un progetto a Varianza Minima, il cui grafico può essere utile solo per uno scopo comparativo, ma affidarsi quindi alla nuova misurazione sul campo con il Rumore utilizzato alla ricerca di correzioni tonali e modifiche di installazione atte ad arrivare alla Varianza Minima in campo reale.
Problemi, Cause e Rimedi
In fase di analisi della risposta Magnitude se si verifica alcune condizioni, queste potrebbero essere sintomo di problemi.
Fig. 30

Come si vede in figura 30, la linea verde mostra un problema di fase e questo è rilevato a partire della frequenza di incrocio del crossover, si presente come un’ampia inversione di fase a dimostrare che è un filtro con pendenza di taglio non superiore ai 12 dB/ottava altrimenti sarebbe più contenuta ed è un inversione di fase del Tweeter, difatti invertendo la polarità (risposta linea azzurra) il sistema torna ad essere lineare.
Fig. 31

In figura 31 la stessa sorgente ripresa a distanze differenti, si nota l’effetto prossimità della linea rossa che causa anche un livello energetico di ripresa maggiore, una distanza media (linea verde) che mostra un andamento più equilibrato, ed una ripresa a maggiore distanza (linea arancio) che mostra gli effetti del Comb Filtering essendo stata un ripresa al chiuso all’interno di una stanza.
Questo sta a significare che le risposte oltre ad essere catturate vanno anche analizzate, in modo tale da escludere questo dalla calibrazione del sistema sotto analisi (se si equalizza un punto di controfase, la risposta acustica rimarrà sempre in controfase, ma andrà invece a tendere verso la distorsione il segnale elettrico tanto più si amplifica),
In questo caso può voler dire di allontanare la ricezione di prossimità ed escludere dalla correzione di media tonale le zone di ombra della risposta a distanza.
Fig. 32

In comparazione della risposta di diversi finali di potenza per una stessa sorgente sonora di riferimento è possibile notare come nel caso di figura 32 il finale di potenza dalla curva abbia un Notch a circa 1 Khz, mentre tutti gli altri hanno un andamento più o meno simile. Questo è indice di un problema al finale di potenza legato soprattutto all’andamento di fase e capiremo poi il perchè. Guardando poi attentamente l’andamento delle curve si può notare come il finale della curva rosa abbia una risposta tonale più attenuata in bassa e più amplificata in alta rispetto agli altri, indice di una distribuzione in potenza e colorazione tonale differente.
Continuando ad analizzare le curve è possibile anche notare che avendo prima detto la sorgente sonora essere la stessa ed aggiungo a 2 vie, si abbia una risposta fortemente attenuata nell’intorno del Notch a 2 Khz. Questo sta a significare che c’è probabilmente un problema di fase alla frequenza di taglio del crossover che in questo caso sembra essere attorno ai 1.000 Hz. Da provare quindi a girare la fase o a cambiare la frequenza di taglio dopo attenta valutazione. Spesso vecchi diffusori, quindi anche altoparlanti e crossover, usurandosi nel tempo possono tendere a girare la fase, spostare la frequenza di taglio e altri fenomeni che portano a distorsioni. E’ bene quindi ogni tanto analizzare la risposta dei propri diffusori per valutare che non si verificano mal funzionamenti e che il sistema sia sempre lineare ed in fase, ed in aiuto ovviamente può esserci l’avere come riferimento la risposta nativa della sorgente quando acquistata come nuovo.
Molti considerano l’uscita di potenza come una cosa univoca da applicare all’altoparlante, se l’altoparlante ha ad esempio 100 watt, allora gli metto un amplificatore da 100 watt, a parte il discorso dell’impedenza e della corretta potenza da applicare in base all’Headroom dell’altoparlante già analizzata in questa serie di articoli, concentriamoci sulla risposta tonale.
Guardando la figura 31 la potenza del finale con linea rosa è distribuita in modo differente rispetto a quella delle altre linee, questo vuol dire ad esempio che a parità di potenza il finale linea rosa ha più alti mentre gli altri hanno più bassi, ma questo va bene se l’altoparlante è singolo con tutta la potenza applicata ad esso, ma se il diffusore è costituito da 2 o più vie di altoparlanti a diverse potenze a meno di non usare un amplificazione separata per più vie che è sempre la cosa consigliata per risolvere anche questo tipo di problematiche, l’andamento di potenza tonale è un fattore chiave.
Quando questa potenza è divisa dal crossover, in questo caso la via verso i bassi ha più potenza della via verso gli alti e quindi un altoparlante potrebbe essere maggiormente sovradimensionato in potenza mentre l’altro sottodimensionato, sarebbe quindi utile analizzare la potenza effettiva per la banda che si sta riproducendo, ogni via in modo indipendente, e questo fenomeno può dipendere anche da come è costruito il crossover, potrebbe presentare degli elementi attenuatori ed amplificatori proprio per bilanciare la potenza, ma questa deve essere in ingresso con risposta il più possibile lineare.
Un altro fattore a favore dell’amplificazione separata è ad esempio quando lavoro in equalizzazione e dinamica su bande filtrate, esempio solo bassi o solo alti, il driver altoparlante richiede un comportamento energetico di headroom differente che in utilizzo di singolo amplificatore è impossibile, va a mediare la richiesta dinamica di potenza dei due driver.
L’amplificazione separata per sistemi a più vie è tanto più consigliata quanto più il finale di potenza non ha una risposta tonale lineare.
Fig. 33

Un altro fattore chiave che pochi pensano non essere importante è la scelta del cavo di potenza, ma lo stesso vale per il segnale microfonico e di linea. Come si vede dalla figura 33 a parità di catena audio sotto analisi cambiando solo la tipologia di cavo Speakon, si nota come cavi diversi possano dare risposte tonali differenti, e questo è fondamentale per avere un segnale trasparente.
Il migliore cavo è senz’altro quello che mantiene una maggiore linearità e potenza, senza grosse perdite di potenza come il caso del cavo con linea verde ed un po’ meno il blu, o la generazione di controfasi come il Notch a circa 800 Hz per il cavo con linea viola. I maggiori difetti ed interferenze di verificano a partire dalle alte frequenze a scendere.
Acquista Attrezzature Audio dai principali Store


